



0
0-20mA Stromkreis1
1-Massen-Schwinger2
2-Leiter-Schaltung3
3-Leiter-Schaltung4
4-20mA Stromkreis4-Leiter-Schaltung
6
6-Leiter-SchaltungA
Abdichtung, EpoxyAbdichtung, Silikon
Abschirmung
Absolutdruck
Absolutencoder
Absolute Wegaufnehmer
Abtastrate
AC-Coupling, DC-Coupling
A/D-Wandlung
Adapter, für Montage
Admittanz, mechanische Mobilität (admittance, mobility)
Aktoren
Aliasingeffekt
Alkyl-Ketten
Ampere
Amperemeter
Amplitudengang
Amplitudenhistogramm
Analogoszilloskop
Analog-Digital-Oszilloskop
Angloamerikanisches Einheitensystem
Anode
Anstiegszeit
Anti-Aliasingfilter
Antwortfunktion
Anzugsdrehmoment
aperiodischer Grenzfall
Applizierung
Arbeitstemperaturbereich
ASIC
ATEX
Auflösung
Aufnehmer
Ausgangsvorspannung
Ausgang, normierter
Ausgang mit Trennstufe, gepufferter Ausgang
Aussteuerungsbereich
Autokorrelationsfunktion
Autoleistungsdichte (Autoleistungsspektrum)
Azimut
B
Back-To-Back-KalibrierungBadewannen-Kurve
Bandbreite
Bandpass Filter
Bandsperre Filter
Basisgrößen und Einheiten des SI-Systems
Bel
Berstdruck
Beschleunigung
Beschleunigung-Winkel-Beziehung
Beschleunigungsaufnehmer
Beschleunigungsaufnehmer, induktiv
Beschleunigungsaufnehmer, kapazitiv
Beschleunigungsaufnehmer, MEMS
Beschleunigungsaufnehmer, Montage
Beschleunigungsaufnehmer, Montage mit Klebe-Montagesockel
Beschleunigungsaufnehmer, Montage mit Gewinde-Montagesockel
Beschleunigungsaufnehmer, piezoelektrisch
Beschleunigungsaufnehmer, piezoresistiv
Beschleunigungsaufnehmer, Servo
Beschleunigungsaufnehmer, MEMS-Servo
Betriebsdruck
Betriebsfestigkeit
Betriebsschwingformanalyse
Betriebstemperaturbereich
bewegte Masse
Bezugsnormal
bipolare Speisung
bipolar, Netzteil
Bit-Rauschen
Bode-Diagramm
Bonden, Bonddrähte
Braunsche Röhre
Bruchlast
Brücke
Brückenschaltungen
Brückenverstärker
BSL - Best Straight Line
BSLTZ - Best Straight Line through Zero
Buffered Output, Buffer Amplifier
Bürde
C
Coulombsche KraftgesetzCoupling, AC/DC
cardanische Aufhängung
Gerolamo Cardano
CGS-Einheiten
Chip
Common (gemeinsames Nullpotential)
Compliance (elastische Nachgiebigkeit)
Compression-Mode (Kompressionsbetrieb)
Coriolisbeschleunigung, Corioliskraft
Curie, Jacques und Pierre
Curve Fitting
Cyanoacrylate (Sekundenkleber)
D
DAkkS - Deutsche AkkreditierungstelleDämpfung
Datenblatt, Technisches
Datenerfassungskarte
Datenlogger
DC-Coupling, AC-Coupling
Dehngrenze
Dehnung
Dehnungsempfindlichkeit
Demontagewerkzeug
Delta-Funktion
Dezibel (dB)
Dielektrikum
Dichtung, Epoxy
Dichtung, Silikon
Dichring, Selbszentrieren
Dickschichttechnik
differentielle Spannungsmessung
Differenzdruck
Digitalanzeige
Digitalisierung
Digitaloszilloskop
Dirac-Stoß
Direkte Kopplung oder Gleichspannungskopplung
DKD - Neuer Deutscher Kalibrierdienst
DMS
DMS, Fehlersuche
DMS, Beschleunigungsaufnehmer
DMS, Drehmomentaufnehmer
DMS, Druckaufnehmer
DMS, Kraftaufnehmer
DMS-Sensoren Inbetriebnahme
Doppler-Effekt
Dotieren
Drehmoment
Drehmomentaufnehmer
Drehmomentaufnehmer, DMS
Drehmomentaufnehmer, PCME
Druck
Druckaufnehmer
Druckaufnehmer, frontbündig
Druckaufnehmer, Flachform-
Druckaufnehmer, Montage
Druckaufnehmer, piezoelektrische
Druckaufnehmer, piezoresistive
Druckaufnehmer, mit zurückgezogener Membran
Druckausführung, absolut
Druckausführung, gekapselt
Druckausführung, relativ
Druckkanal
Druckmessgerät
Druckport
Druckstoß
DTC - Discharge Time Contant (Entladezeitkonstante)
Dünnschichttechnik
Durchbiegung
Durchgangsprüfer
Duromere
Duroplast
DVM
DVRT
Dye
dynamische Drehmomentaufnehmer
dynamische Masse, Dynamic Mass
dynamische Steififkeit, Dynamic Stiffness
Übertragungsfunktion, elastische Nachgiebigkeit (Compliance)
Übertragungsfunktion, mechanische Admittanz, mobilität (Mobility, Mechanical Admittance)
Übertragungsfunktion, Inertanz(Accelerance, Inertance)
E
EichenEigenfrequenz
Eigenmasse
Eigenmoden
Einheiten, CGS-System
Einheiten, Gaußsche
Einheiten, angloamerikaische Einheiten, imperiale
Einheiten, Metrische
Einheiten, MKS-System
Einheiten, MKSA-System
Einheiten, SI
Einschwingzeit
Eigenfrequenz
Eigenmoden
Eigenvektoren
Eigenwerte
Eigenwertanalyse
elastische Nachgiebigkeit (Compliance)
elastischer Bereich
Elastizitätsgrenze
Elastizitätsmodul
elektrische Felder
elektrischer Widerstand
elektrischer Widerstands Standard
elektrolytischer Neigungssensor
Elektrostriktion
EMA (experimentelle Modalanalyse, Experimental Modal Analysis)
Empfindlichkeit
Encoder
Encoder, Absolut
Encoder, Inkremental
Encoder, Vierflankenauswertung, Richtungserkennung
Entladezeitkonstante (DTC)
Epoxy, Epoxidharz
Epoxidharz-Klebstoffe
Erdbeschleunigung
Erdbeschleunigung, Standard
erdfrei
Erwartungswert
ESS (Environmental Stress Screening)
experimentelle Modalanalyse (EMA, Experimental Modal Analysis)
F
faradayscher Käfigfaradaysches Induktionsgesetz
Feder-Masse-System
Fehler
Fehlersuche
Fehlersuche, DMS-Sensoren (mit integriertem Verstärker)
Fehlersuche, DMS-Sensoren (ohne integrierten Verstärker)
Fehlersuche, piezoelektrische Sensoren
Fehlersuche, Messverstärker
Fehlersuche, potentiometrische Sensoren
Fehlerquellen
FEM (Finite Elemente Methode)
FET (Field Effect Transistor)
Feuchte, relative
FFT
FFT an rotierenden Systemen (Ordnungsanalyse)
FFT, invers
FFT-Analysator
FFT-Autokorrelationsfunktion
FFT-Autoleistungsdichte (Autoleistungsspektrum)
FFT-Blackman-Harris-Fenster
FFT-Farbspektrogramm
FFT-Fensterfunktion
FFT-Hanningfenster
FFT-Hammingfenster
FFT-Lagerüberwachung
FFT-Rechteckfenster
FFT-Kohärenzfunktion
FFT-Kreuzkorrelationsfunktion
FFT-Kreuzleistungsdichte (Kreuzleistungsspektrum)
FFT-Übertragungsfunktion
FFT-Wasserfalldarstellung
Filter
Filter, analoge
Filter, Bandpass
Filter, Bandsperre
Filter, Butterworth
Filter, Grenzfrequenz
Filter, digitale
Filter, digitale, FIR
Filter, digitale, IIR
Filter, Hochpass
Filter, mechanisch
Filter, Mittenfrequenz
Filter, Tiefpass
Fit
Finite Elemente Methode (FEM)
Flachform-Druckaufnehmer
Flachprofil - Kraftaufnehmer
Flüssigkeitseingenschaft-Sensoren
Biegebauform (Flexular Mode)
Folien-DMS
Fourierkoeffizienten
Fourierreihe
Francis-Turbine
Frequency Response Function
Frequenzanalyse (FFT)
Frequenzen, Musiknoten
Frequenz, Passier (Kugellager)
Frequenz, Primär (Riemen)
Frequenzgang
Frequenzspektrum
frequenzoptimiert
FRF Frequency Response Function
frontbündiger Druckaufnehmer
Fulleren
G
GefügeaufbauGekapselte Druckausführung
gemeinsames Nullpotential (Common)
gepufferter Ausgang, Ausgang mit Trennstufe
Geräteklassen
Genauigkeit
Genauigkeitsklassen
Gesamtgenauigkeit
Gewicht, kgf (kilogram force)
Gewinde
Gewinde, Amerikanisch
Gewinde, kegelig
Gewinde, metrisch
Gewinde, Spitz
Gewinde, Witworth dichtend
Gewinde, Witworth nicht dichtend
Gewinde, Zoll
Gewinde, zylindrisch
Gieren
Gleichdruckeffekt
Gleichspannungskopplung oder Direkte Kopplung
Graphen
Grenzfrequenz
Grundresonanzfrequenz
Gyrokompass
Gyroskop
Gyroskop, MEMS
Gyroskopischer Effekt
H
HBT, Half Bridge TransducerHalbbrücke
Halbleiter-DMS
Hall-Effekt
Hall-Sensor
Hall-Spannung
HALT-HASS Lebensdauer und Belastungsprüfung
HALT (Highly Accelerated Life Testing)
Hammerkit
Hammeranregung
HASS (Highly Accelerated Stress Screen)
Häufigkeitsfunktion
Hammeranregung, mehrfach
Hammerschlag, mehrfach
harmonische Schwingung
harmonische Schwingung, komplex
Himmelskugel, HImmelssphäre
Hüllkurven-Demodulation
Hochpass Filter
Höhenwinkel
Hookescher Bereich
Hookesches Gesetz
Hopkinsonstab (Hopkinson Bar)
HTV-Silikonelastomeren
HUMS
Hybrid-Elektronik
Hybrid-Verstärker, integriert
Hysterese
I
ICIEPE: Integrated Electronics Piezo-Electric
IEPE Sensoren, Sättigung
IP-Schutzarten
Imperiales Einheitensystem
Impulshammer
In-Line Verstärker
Inbetriebnahme, DMS-Sensoren
Induktionsgesetz
Induktionsprinzip
Integrierter Verstärker
induktiver Beschleunigungsaufnehmer
inelastischer Bereich
Inertanz (Accelerance, Inertance)
Inklinometer
Inklinometer, konduktiv
Inklinometer, elektrolytisches
Inklinometer, kapazitives
Inklinometer, magnetoresistives
Inkrementalencoder
inkrementale Wegaufnehmer
Influenz
Interface
Ionenimplantation
Isolierungswiderstand bei Aufnehmern
Isolatorausführung
Isolierung
Istdruck
J
JFETJoukowski-Stoß
Joule
Justierung
K
k-WertKabel
Kalibrierdatenblatt
Kalibriernormal
Kalibrierschein
Kalibrierung
Kalibrierung bei 50% vom Nennbereich
Kalibrierung, absolute
Kalibrierung, Beschleunigung, Back-To-Back
Kalibrierung, Beschleunigung, Freier-Fall
Kalibrierung, Beschleunigung, frequency sweep (frequenzdurchlauf)
Kalibrierung, Beschleunigung, Hopkinsonstab
Kalibrierung, Beschleunigung, Pendel
Kalibrierung, Beschleunigung, Projektil
Kalibrierung, DKD
Kalibrierung, Drehmoment
Kalibrierung, Druck
Kalibrierung, Kraft
Kalibrierung, mehrachsiale Kraftaufnehmer
Kalibrierung, n-Punkte
Kalibrierung, rückführbare
Kalibrierung, Stoß
Kalibrierung, vergleichende
Kalibrierung, Weg
Kalibrierung, Werks
Kalibrierung, Zentrifugen
Kalibrierzertifikat
Kalibrierzeugnis
kapazitive Kopplung oder Wechselspannungskopplung
kapazitiver Beschleunigungsaufnehmer
Kathode
Kavitation
Kennlinie
kgf (kilogram force), Gewicht
Klassenhäufigkeit
Klassifizierung dynamische signale
Klassifizierung, aperiodisch
Klassifizierung, deterministisch
Klassifizierung, ergodisch.
Klassifizierung, harmonisch
Klassifizierung, nicht ergodisch.
Klassifizierung, instationär
Klassifizierung, komplex harmonisch
Klassifizierung, oszillierend (fast-periodisch)
Klassifizierung, periodisch
Klassifizierung, stationär
Klassifizierung, transient (relaxierend)
Klassifizierung, stochastisch
Klaviertasten, Frequenzen
Klebstoff
Klebstoff, Epoxidharz
Klebstoff, Methylmethacrylat
Klebstoff, Sekundenkleber
Klebstoff, Topfzeit
Kohärenzfunktion
Kohlenstoff-Nanoröhren
Kompensierung, Thermisch
Kompensierung des thermischen Nullpunktoffsets
Kompensierung der thermischen Sensitivitätsänderung
kompensierter Temperaturbereich
Korrelation
Körperschall
Kraft
Kraftaufnehmer
Kraftaufnehmer, DMS
Kraftaufnehmer, Krafteinleitung bei Montage
Kraftaufnehmer, Montage (S-Profil)
Kraftaufnehmer, Montage (Flachprofil)
Kraftaufnehmer, Montage (Unterlegscheiben-Profil)
Kraftaufnehmer, piezoelektrisch
Krafteinleitung
Kraftkompensierung
Kreisel
Kreiselinstrument
Kreiselkompass
Kreuzkorrelationsfunktion
Kreuzleistungsdichte (Kreuzleistungsspektrum)
kritische Dämpfung
Kugel-Passierfrequenz
Kurvenanpassung
L
LabornetzteilLabornetzteil, bipolar
Labornetzteil mit Sense-Leitung
Ladungsausgang
Ladungsbetrieb
Ladungsverstärker
Lagertemperaturbereich
Lagerüberwachung
Laserwegaufnehmer
Lastwiderstand
Lastzelle
Leitfaden zu Anschluß und Montage von DMS-Aufnehmern
Leistungsdichte
Lineare Regression
linearer potentiometrischer Wegaufnehmer
Linearität
Linearisierung
Liniendruck
logarithmische Rechenregeln
Low-Noise-Kabel
Lorentz-Kraft
LSB, Least Significant Bit
Luftdämpfung
LVDT, Linear Variable Differential Transformer
LVIT, Linear Variable Inductance Transducer
M
MAC-Matrix (Modal Assurance Critereon)magnetoresistiver Effekt
Magnetostriktion
Magnetostriktion, inverse
Magnetostriktive Wegaufnehmer
Manometer
Mass-Loading
Masseschleifen
Masse, seismische
Materialien der Zukunft
Materialprüfung
Materialprüfung, Lagerüberwachung
Maxwell-Gleichungen
mechanische Filter
mechanische Admittanz, mobilität (Mobility, Mechanical Admittance)
mechanische Impedanz (Mechanical Impedance)
Medientemperatur
Mehr-Punkte-Kalibrierung
MEMS
Messbereich
Messbrücke
Messdose
Messtaster
Messwertaufnehmer
Messwertübertragung
Methode der kleinsten Quadrate
Methylmethacrylat-Klebstoffe
Metrisches Einheitensystem
MicrofusedTM
Mikroelektronik
Mikromechanik
mikromechanisch gefertigter (MEMS) Beschleunigungsaufnehmer
Miniaturaufnehmer
Mittelrauhwert
Mittenfrequenz Filter
MKS-Einheiten
MKSA-Einheiten
mobilität, mechanische Admittanz (Mobility, Mechanical Admittance)
Modalanalyse
Modalanalyse, analytische (AMA, Analytic Modal Analysis)
Modalanalyse, experimentelle (EMA, Experimental Modal Analysis)
Modalanalyse aus Betriebsdaten(OMA, Operational Modal Analysis)
Modal-Abgestimmt
Modal Assurance Critereon (MAC-Matrix)
modale Größen
modale Parameter
Moden
Moden-Ordnungszahl
Monomere
monopolare Speisung
Montage, Sensoren
Montage, Beschleunigungsaufnehmer
Montage, Beschleunigungsaufnehmer mit Klebe-Montagesockel
Montage, Beschleunigungsaufnehmer mit Gewinde-Montagesockel
Montage, Druckaufnehmer
Montage, frontbündiger Druckaufnehmer
Montage, Flachform-Druckaufnehmer
Montage, Krafteinleitung bei Kraftaufnehmer
Montage, S-Profil-Kraftaufnehmer
Montage, Flachprofil-Kraftaufnehmer
Montage, Unterlegscheibenkraftaufnehmer
Montageadapter für Sensoren
Montagesockel
MOSFET
Motorklopfen
MST
Multikomponentenkraftmessung
Multimeter
Musiknoten, Frequenzen
N
NäherungsschalterNanoröhren, Kohlenstoff
Neigung (Höhenwinkel)
Neigungssensor
Neigung-Beschleunigung-Beziehung
Neigungssensor, konduktiv
Neigungssensor, elektrolytischer
Neigungssensor, kapazitiver
Neigungssensor, magnetoresistiver
NEMA-Klassifikation
Nenndruck
Nennlast
Netzteil
Netzteil, bipolar
Netzteil mit Sense-Leitung
Nichtlinearität
Nicken
Niederfrequenzverhalten
NIST
Normdruck
normierter Ausgang
normierte Empfindlichkeit
normierte Sensitivität
Nullpunktabgleich, Tara, Offsetabgleich
Nullpunktversatz, Offset
NVH
Nyquist-Shannon Theorem
O
ODS, Operating Deflection Shapes AnalysisODS, Spektral
ODS, Zeit
Offset, Nullpunktversatz
Offsetabgleich, Tara, Nullpunktabgleich
Ohmmeter
Öldämpfung
OMA (Modalanalyse aus Betriebsdaten, Operational Modal Analysis)
Operational Modal Analysis (OMA, Modalanalyse aus Betriebsdaten)
Ordnungsanalyse
Ordnungsanalyse-Lagerüberwachung
Ordnungsspektrum
Oszilloskop
Oszilloskop-Simulator
Oszilloskop, analog
Oszilloskop, analog-digital
Oszilloskop, digital
Oszilloskop, PC-gestützt
P
PascalPassierfrequenz
PCME (Pulsed Current Modulation Encoding)
PCME-Drehmomentsensoren
PCME-Drehmomentsensoren, Umlaufmodulation
Peltiereffekt
Pendel-Kalibrator
Permittivität
Phasengang
Phasenumkehr
Phasenverschiebung um 180°
piezoelektrische Beschleunigungsaufnehmer
piezoresistiver Beschleunigungsaufnehmer
piezoelektrische Schaltungen
piezoelektrische Schaltung, Ladungsausgang
piezoelektrische Schaltung, Ladungsverstärker
piezoelektrische Schaltung, Konstantstromquelle
piezoelektrische Schaltung, Konstantspannungsquelle
Piezoelektrische Sensoren, Sättigung
piezoelektrischer Effekt, direkter
Piezoelektrischer Effekt, inverser
piezoelektrizität
Piezokeramik
Piezolautsprecher
Piezopositionierer
piezoresistiver Effekt
Piezo-Stapelaktoren (Piezo-Stacks)
Polarisation
Pole
Polynom
potentiometrischer Wegaufnehmer
Präzession
Primärriemenfrequenz
Produktmängel, Design
Produktmängel, Fertigung
Proportionalitätsgrenze
Prüfdruck
PSI
PTB - Die Physikalisch-Technische Bundesanstalt
Q
Quanten-Hall-EffektQuantisierungsfehler
Quarz
Quasistatisch
Quell-Impedanz
Querbeschleunigungsempfindlichkeit
Querkraftempfindlichkeit
Querkraft, maximal
R
Ratiometrischer AusgangRauhtiefe
Rauschen
rauscharmes Kabel
Rechte Hand Regel
Reibungselektrischer Effekt bei Messkabeln
Relativdruck
Reproduzierbarkeit
resistiver Wegaufnehmer
Resonanzfrequenz
Rheostat
Richtungserkennung, Vierflankenauswertung
Riemenarten
Riemenantriebsüberwachung
Riss-Erkennung
RS-232
RS-422
RTV-Silikonelastomeren
S
SanShiftTMSättigung, IEPE Sensoren
Schaltungen, Brücken
Schaltungen, piezoelektrisch
Schiffsbewegungen
Schleifring
Scherbauform (Shear Mode)
Schock
Schockaufnehmer
Schraubbefestigung
Schütteltisch
Schwingerreger
Schwingerreger, elektrodynamisch
Schwingerreger, piezoelektrisch
Schwingerreger, verleich
Schwinggeschwindigkeit
Schwingung
Schwingung, klassifizierung
Schwingungsaufnehmer
Schwingungsanalyse
Schwingungsanalyse an rotierenden Systemen
Schwingungsanalyse an Lagern
Schwingungsanalyse an Riemenantriebe
Schwingungsanalyse, Antriebe
schlechte Fluchtung.
Unwucht.
Schwingungsmessung
Schwingungsmoden
Schwingweg
Schwoien
SCSP-Elektronik (Signal Conditioning and Signal Processing)
Seismik-Aufnehmer
Seilzugwegaufnehmer
Seitenkräfte Sekundenkleber (Cyanoacrylate)
Selbstinduktion
Selbstzentrierender Dichtring
Sense
Sensitivität
Sensitivität, Definitionstandards
Sensitivität, normierte
Sensordemontage, geklebte Beschleunigungsaufnehmer
Sensoren
Sensoren, DMS
Sensoren, Beschleunigung - DMS
Sensoren, Beschleunigung - PE
Sensoren, Drehmoment - DMS
Sensoren, Drehmoment - PCME
Sensoren, Druck - DMS
Sensoren, Druck - PE
Sensoren, Fehlersuche
Sensoren, Kraft - DMS
Sensoren, Kraft, PE
Sensoren, Montageadapter
Sensor-Array
Sensormontage
Sensormontage, Adapter
Sensormontage, Beschleunigungsaufnehmer
Sensormontage, Beschleunigungsaufnehmer, abdrehen geklebte Sensoren
Sensormontage, Beschleunigungsaufnehmer mit Klebe-Montagesockel
Sensormontage, Beschleunigungsaufnehmer mit Gewinde-Montagesockel
Sensormontage, Druckaufnehmer
Sensormontage, frontbündiger Druckaufnehmer
Sensormontage, Flachform-Druckaufnehmer
Sensormontage, Krafteinleitung bei Kraftaufnehmer
Sensormontage, S-Profil-Kraftaufnehmer
Sensormontage, Flachprofil-Kraftaufnehmer
Sensormontage, Unterlegscheibenkraftaufnehmer
Servo
Shaker
Shaker, elektromagnetisch (elektrodynamisch)
Shaker, piezoelektrisch
Shaker, verleich
Shock exciter, Stoßerreger
Shock exciter, piezoelektrische
Shear Mode (Scherbauform)
Scherbauform, Azimut (Annular Shear Mode)
Scherbauform, Planar (Planar Shear Mode)
Shunt-Widerstand
SI-Basisgrößen und Einheiten
Silikon, Silikonelastomer
Signal- zu Rauschverhältnis
Signalaufbereitung
Signalformen, periodisch
Signalform, Dreieck
Signalform, Rechteck
Signalform, Sägezahn
Signalüberlagerung
Signalverarbeitung
Signalverlauf, klassifizierung
single ended (SE) Spannungsmessung
SMD
Sockel
Sockeldehnung
Solldruck
Sondermessbereiche
Spannungs-Dehnungs-Kurve
Spannungsbetrieb
Spannungsmessung
Spannungsmessung, single ended (SE)
Spannungsmessung, differentiell (diff.)
Spannungsteiler
Speisespannung
Spektrum, Frequenz
SPS
Stabilisierungsdiagramm
statisch
Steifigkeit, k
Steigung
statische Drehmomentaufnehmer
Steuerdruck
Superposition
Stoßerreger, Shock exciter
Stoßerreger, piezoelektrische
Streckgrenze
Stromstoß
Strukturanalyse
Strukturanalyse, Lagerüberwachung
Stufenfunktion
Sublimation
Summenhäufigkeit
Summierschaltung
Systemdruck
Systempole
T
Tara, Nullpunktabgleich, OffsetabgleichTauchen
TC (Time Constant, Zeitkonstante)
TCR
Technisches Datenblatt
technische Elastizitätsgrenze
TEDS (Transducer Electronic Data Sheet)
TEDS, Virtueller
Telemetrie
Telemetrie per Funk
Telemetrie per Infrarotlicht
Telemetrie per induktiver Übertragung
Temperaturbeiwerte
Temperaturbereiche
Temperaturkoeffizient
Temperaturkoeffizienten des Widerstands
Temperaturkompensierung
Temperaturkompensierung, aktiv
Temperaturkompensierung, passiv
Temperaturkompensierung, Wheatstonesche Brücke
Temperaturschock
Temperaturtransient
thermische Nullpunktverschiebung
thermische Nullpunktoffset-Kompensierung
thermische Sensitivitätsänderung
thermische Sensitivitäts-Kompensierung
thermisches Verhalten
Thermistor
Thermoelement
Thermocouple
Thermopaar
Thermoplast
Tiefpass Filter
Topfzeit
Tot-Volumen
Trägerfrequenz, Trägerfrequenzverstärker
Transferfunktion
transienter Verlauf
Transientenanalyse
Transmitter
Treibriemenarten
Trennverstärker, Ausgang mit Trennstufe
Triangulation
Triaxialaufnehmer
Triboelektrischer Effekt
Triboelektrisches Rauschen
Turmalin
U
ÜberdehnungÜberdruck
Überlastbarkeit
Überlastbarkeit ohne Zerstörung
Überlastschutz
Überlast-Erholzeit
Überlastung
Überschwingen
Übersprechen
Übersteuerung
Übertragungsbereich
Übertragungsfunktion
Übertragungsfunktion dynamische Masse(Dynamic Mass)
Übertragungsfunktion, mechanische Impedanz(Mechanical Impedance)
Übertragungsfunktion, dynamische Steifigkeit(Dynamic Stiffness)
Übertragungsfunktion, elastische Nachgiebigkeit (Compliance)
Übertragungsfunktion, mechanische Admittanz, mobilität (Mobility, Mechanical Admittance)
Übertragungsfunktion, Inertanz(Accelerance, Inertance)
Übertragungsfaktor
Übertragungskoeffizient
Ultraschallwegaufnehmer
Umlaufdruck
Umlaufmodulation bei PCME-Drehmomentsensoren
Umweltsimulation
Unterdruck
V
v.B.v.E.
v.M.
Vakuum
Ventilschlag
Verdichtungsdruck
Vergleichsnormal
Verlauf, dynamischer
Verlauf, quasi-statischer
Verlauf, statischer
Verlauf, transienter
Verpolung
Verteilungsdichte
Verteilungsfunktion
Vibration
Vibrator
Vierflankenauswertung, Richtungserkennung
Viertelbrücke
Villary-Effekt
Vollbrücke
Voltmeter
volumetrische Empfindlichkeit
von-Klitzing-Konstante
Vorlast
W
WaferWahrscheinlichkeitsdichte
Wahrscheinlichkeitsverteilung
Wägezelle
Wanken
Wasserhammer
Wasserschlag
Wechselspannungskopplung oder kapazitive Kopplung
Wegaufnehmer
Wellenform, klassifizierung
Wheatstonesche Messbrücke
Widerstand, elektrischer
Widerstands Standard, elektrischer
Wiederholbarkeit
Wiedemann-Effekt
Winkel-Beschleunigung-Beziehung
Winkelaufnehmer
Wirbelstromwegaufnehmer
Wogen
X
Y
Young's ModulusZ
ZeigerdiagrammZeitkonstante (TC)
Zenit
Zugfestigkeit
Zulässiger Druck
Zukunftsausblick
0-20mA
-> 0-20mA und 4-20mA Stromkreise

1-Massen-Schwinger
Ungedämpft:



gedämpft:


-> Modalanalyse, 1-Massen-Schwinger
2-Leiter-Schaltungunen
Beispiele für Zwei-Leiterschaltungen sind:
- Brücken: 4-20 mA Stromschaltungen

-> Brückenschaltungen
- Piezoelektrisch: Ladungsschaltung


- Piezoelektrisch: IEPE

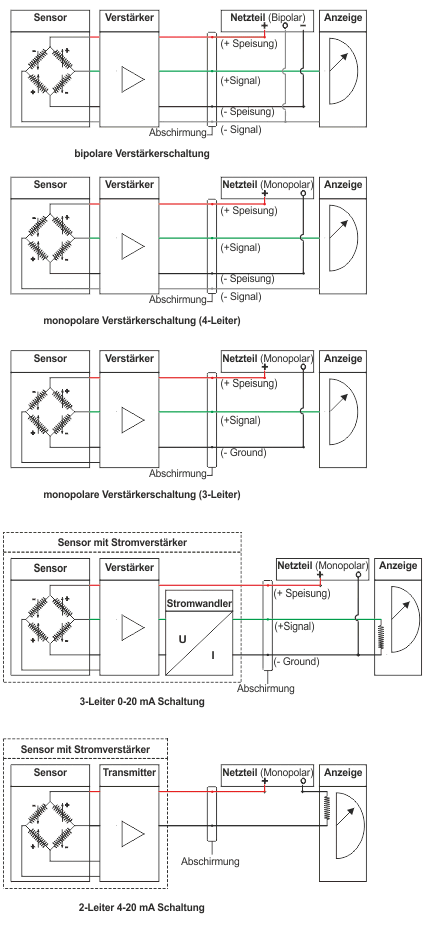
3-Leiter-Schaltung
Eine 3-Leiter-Brückenschaltung ist wie die 4-Leiter-Schaltung aufgebaut, wobei die Versorgungs- und Signalübertragungsmassen kurzgeschlossen sind.
Diese Schaltung findet man bei DMS-Sensoren mit integriertem Spannungsverstärker vor.

0-20mA Stromkreise sind auch auf 3 Leitern aufgebaut.
-> Brückenschaltungen
-> Hybrid-Verstärker, integriert
-> Transmitterbetrieb
-> Vollbrücke
-> Wheatstonesche Messbrücke
4-20mA Stromkreis
4/20mA- Stromkreise werden häufig für industrielle Anwendungen eingesetzt, bei denen das Sensorsignal über lange Strecken (über 100m) übermittelt werden muss und starken Störsignalen ausgesetzt ist. Sie besteht aus
- einem Sensor
- einem Spannung-Strom-Konverter und Signalverarbeitungsmodul
- einer Stromversorgung (meistens 24V) und
- einem Messgerät
Mit dem Strom von mindestens 4 mA kann der Sensor versorgt werden. Das Spannungssignal des Sensors wird in ein Stromsignal umgewandelt (20mA max.) und am Messgerät wieder in Spannung zurückgewandelt. Da für die Versorgung und Signalübertragung nur zwei Leitungen benötigt werden nennt man solche Schaltung auch 2-Leiter-Schaltungunen (-> Brückenverstärker). Ein weitere positiver nebeneffekt ist, dass sich ein Kabelbruch festestellen lässt, falls der Strom unter 4 mA sinkt.
Es ist auch möglich mit einem Drei-Leitersystem die Spannungsversorgung des Sensors vom Stromkreis zu trennen.
Ein 0-20mA Stromkreise ist in diesem Fall auch möglich, da hier die 4mA für die Versorgung des Sensors nicht mehr benötigt wird.
Spannungssignale werden bei langen Kabelstrecken verfälscht da die Spannung aufgrund des Kabelwiderstands abfällt. Durch möglichst hochohmige Eingänge und abgeschirmte Kabeln lässt sich der Messfehler minimieren. Aufgrund des hochohmigen Aufbaus bleibt aber eine große Empfindlichkeit gegenüber Störungen kapazitiver und induktiver Art, da die Kabel häufig in der Nähe von elektrisch rauschenden Systemverdrahtungen verlaufen.
Bei der Stromübertragung sind Fehler auf Grund des Kabelwiderstands ausgeschlossen, denn obwohl Spannungsabfälle entstehen ('loop drops' genannt) — bleibt das 4-20mA Signal erhalten, da die Elektronen im Stromkreis nicht 'verloren gehen' können. Störströme sind hierbei klein im Vergleich zu den Sensorströmen. Durch den Einsatz von verdrillten Kabeln lassen sich induktive Störungen minimieren.
-> Brückenverstärker
-> Brückenschaltungen
4-Leiter-Schaltung
Bei Sensoren, die über eine 4-Leiter-Schaltung verfügen, erfolgt die Versorgung und Signalübertragung jeweils über zwei Leitungen.


-> Brückenschaltungen
-> Vollbrücke
-> Wheatstonesche Messbrücke
-> Transmitterbetrieb
-> Brückenverstärker
6-Leiter-Schaltung
Ist die Zuleitung von Sensoren auf DMS-Basis zu lang, führt ein Spannungsabfall durch den Kabelwiderstand zu einer Verfälschung des Ausgangssignals.
Um dies zu vermeiden, wird eine Fühlerleitung am Speisungsanschluss des Sensors hinzugefügt (auch Sense genannt), die es ermöglicht, diesen Spannungsabfall zu messen und zu korrigieren.

-> Brückenschaltungen
-> Wheatstonesche Messbrücke
-> Brückenverstärker
Abschirmung
Das Vorhandensein elektrischer Spannung führt zu einem elektrischen Feld. Dieses Feld wiederum ist in der Lage, elektrische Ladungen zu beeinflussen (Influenz). Daher müssen Messeinrichtungen durch eine geeignete Abschirmung vor elektromagnetischen Feldern geschützt werden, damit es dort nicht zu Fehlerspannungen kommt, die das Messergebnis verfälschen. Die Abschirmung besteht aus eine metallischen Hülle, die als faradayscher Käfig wirkt.
Absolutdruck
Der Absolutdruck ist der Druck, der relativ zum absoluten Vakuum (festgelegt auf 0 bar) gemessen wird.
-> Druck
-> Relativdruck
-> Gekapselte Druckausführung
Absolute Wegaufnehmer
Absolute Wegaufnehmer messen die aktuelle Position und liefern ein dem Weg proportionales Signal.
-> Inkrementale Wegaufnehmer
-> Wegaufnehmer
Abtastrate
Die Abtastrate ist die Frequenz, mit der analoge Signale bei der A/D-Wandlung abgetastet werden.
Laut dem Nyquist Theorem sollte die Abtastrate höher als 2 mal so hoch sein, wie die höchste zu messende Frequenz, um Aliasingeffekte zu vermeiden. Dies ist für die Ermittlung der Frequenz zwar richtig, nicht jedoch für die Wiedergabe der Amplitude. Ist die Abtastrate genau 2 mal so hoch, dann kann es im schlimmsten Fall dazu führen, dass zwar die Frequenz stimmt, aber die Amplitude Null ist.

Dies wird im obigen Beispiel verdeutlicht, wobei dort die Abtastrate etwas höher ist als zweifach, um das Prinzip zu verdeutlichen. Bei einer Phasenverschiebung von 90° würde man allerdings wieder die richtige Amplitude erhalten. Wo die einzelnen Abtastpunkte liegen, kann man zwar bei einer reinen Sinus-Welle mit einem analogen Trigger beeinflussen, bei komplexeren Signalen ist dies aber dem Zufall überlassen.

Schon ab einem Faktor drei erhält man allerdings eine ziemlich genaue Wiedergabe des Signals.

Bei einer 5 mal höheren Abtastrate beträgt die Amplitude ca. 95% des Originalsignals.
Möchte man also eine genaue Wiedergabe des ursprünglichen Signals erhalten, sollte man mindestens 3 mal höher abtasten.
-> Nyquist Theorem
-> Aliasingeffekt
AC Coupling, DC-Coupling
Sensoren liefern häufig ein Signal, das aus einer Wechselspannung (Schwingung) überlagert mit einer Gleichspannung (Offset, Bias) besteht.
Um das Messen sowohl des unverfälschten Signals als auch nur des Wechselspannungsanteils des Signals zu ermöglichen, bieten viele Messgeräte - wie Oszilloskope - zwei verschiedene Arten der Ankopplung des Sensorsignals, wie hier am Beispiel eines typischen IEPE-Signals dargestellt:

AC Coupling (kapazitive oder Wechselspannungs-Kopplung):
Hier wird ein Kondensator in Reihe mit dem Signal angeschlossen. Dadurch wird der DC-Anteil entfernt und nur eine Wechselspannung um 0V dargestellt.
Der Kondensator wird zwischen +Signal des Sensors und +Eingang des Messgerätes angeschlossen.
Das -Signal wird direkt mit dem -Eingang verbunden.
Vorteil: höhere Auflösung
Nachteil: Verlust der Information über DC-Anteile
DC Coupling (Direkte Kopplung oder Gleichspannungskopplung):
Hier wird das tatsächliche Signal unverfälscht dargestellt, also bei einem Signal mit DC- und AC-Anteil wird beides gemessen.
Vorteil: Erhalt der Information über DC-Anteil
Nachteil: niedrigere Auflösung
A/D-Wandlung
Ist die Umwandlung analoger Signale in digitale Signale. Dazu wird in regelmäßigen Intervallen (-> Abtastrate) die aktuelle Amplitude des analogen Signals in digitaler Form gespeichert.
Die mögliche Genauigkeit, mit der die Amplitudenwerte erfasst werden können, hängt dabei von der Anzahl der verwendeten Bits (z.B. 12Bit) ab (-> Auflösung).
Aktoren
Ein Aktor ist ein Gerät, das ein Signal (meistens ein elektrisches Signal) in eine mechanische, physikalische oder chemische Größe umwandelt.
-> Sensoren
Aliasingeffekt
Wenn man ein Signal mit einer Abtastrate erfasst, die weniger als das Doppelte der höchsten im Signal vorkommenden Frequenz beträgt, werden die Frequenzanteile des Signals, die höher als die Hälfte der Abtastrate sind, verfälscht. Die Frequenz und Amplitude werden nicht richtig erkannt, sondern als eine andere, niedrigere Frequenzen und Amplituden gesehen – eben ein „Alias“.
Will man diesen Aliasingeffekt vermeiden - also erfahren, welche Frequenzen tatsächlich in einem Signal auftreten - muss man es mit mindestens der doppelten Abtastrate der höchsten auftretenden Frequenz erfassen: -> Nyquist-Shannon Theorem.
Will man zusätzlich den Amplitudenverlauf realistisch abbilden, muss man die Abtastrate weiter erhöhen, z.B. auf 4 bis 5 mal die höchste Frequenz des Signals. Um hingegen bei fest vorgegebener Abtastrate – beispielsweise durch die verwendete Elektronik/Datenerfassungssysteme - diesen Aliasingeffekt zu vermeiden, werden die Signalfrequenzen oberhalb der halben Abtastrate mittels eines Tiefpass Filter unterdrückt (->Anti-Aliasingfilter).

-> Abtastrate
-> A/D-Wandlung
-> Anti-Aliasingfilter
-> Nyquist Theorem
Ampere
Das Ampere (A) ist die Einheit der Stromstärke.
-> SI-System
Amperemeter
Ein Amperemeter ist ein Messgerät zur Messung des elektrischen Stroms.
Neben dem analogen Amperemeter, das ein Drehspulinstrument zur Anzeige benutzt, gibt es auch digitale Amperemeter, die eine LED- oder LCD-Anzeige benutzen.
-> Multimeter
Anstiegszeit
Ändert sich das Eingangssignal eines Messwertaufnehmers sprunghaft, so folgt das Ausgangssignal stets mit einer bestimmten zeitlichen Verzögerung. Die Zeit, die vergeht bis das Ausgangssignal 90% seines endgültigen Wertes erreicht, wird als Anstiegszeit bezeichnet.
Anti-Aliasingfilter
Um Aliasingeffekte zu vermeiden verwendet man einen ->Tiefpassfilter. Die Elektronik / Datenerfassungssysteme sollte über einen solchen Filter verfügen. Dieser unterdrückt Signalfrequenzen oberhalb der halben eingestellten Abtastrate. Bei Stößen (-> Delta-Funktion) und transienten Ereignissen treten hohe Frequenzen auf. Besonders hier ist der Anti-Aliasingfilter sinnvoll, da sonst zu niedrige Frequenzen angenommen werden.
Antwortfunktion, FRF Frequency Response Function
Die Antwortfunktion ist die Fourier-tranformierte des Antwortsignals
-> Übertragungsfunktion
aperiodischer Grenzfall
-> Kritische Dämpfung
Applizierung
Applizierung bezeichnet das Aufkleben von Dehnungsmessstreifen (DMS) auf Körpern, um damit Verformungen durch Belastung und somit auch die dafür verantwortlichen physikalischen Größen wie Kraft, Drehmoment, Druck oder Beschleunigung messen zu können.
Arbeitstemperaturbereich
-> kompensierter Temperaturereich
ASIC
Abkürzung für: Application Specific Integrated Circuit (Kundenspezifische Integrierte Schaltung)
ATEX
ATEX steht für das französische "ATmosphere EXplosible" und ist eine Leitlinie zur Anwendung der Richtlinie 94/9/EG für Geräte zur Verwendung in explosionsgefährdeten Bereichen.
Die Richtline ist verbindlich seit dem 1. Juli 2003.
Auflösung
- Als Auflösung bezeichnet man im Allgemeinen die kleinstmögliche Änderung einer Größe, die noch zuverlässig gemessen werden kann. Sie hängt von dem Messverfahren und eventuell vorhandenem Rauschen ab.
- Die Auflösung hängt bei der Digitalisierung analoger Signale von der Anzahl der verwendeten Bits ab.
Kann ein A/D-Wandler beispielsweise einen Spannungsbereich von 0-10V mit 12Bit digitalisieren,
so liegt die kleinste detektierbare Spannungsänderung (LSB) bei 10V / 2^12 = 2,4mV
.
Kleinstes auflösbares Signal am Beispiel eines 10 V Signaleingangsbereiches: Auflösung(n) Stufen(2^n) LSB-Spannung dB 2-bit 4 2,5 V -12 4-bit 16 625,0 mV -24 6-bit 64 156,0 mV -36 8-bit 256 39,1 mV -48 10-bit 1.024 9,8 mV -60 12-bit 4.096 2,4 mV -72 14-bit 16.384 610,0 µV -84 16-bit 65.536 153,0 µV -96 18-bit 262.144 38,0 µV -108 20-bit 1.048.576 9,5 µV -120 22-bit 4.194.304 2,4 µV -132 24-bit 16.777.216 596,0 nV -144(-> Bit-Rauschen)

Ausgangsvorspannung
Als Ausgangsvorspannung bezeichnet man den Offset bzw. Nullpunktversatz von IEPE-Messwertaufnehmern. Dieser Offset kann nicht durch Tarieren, sondern lediglich durch Zwischenschalten eines Kondensators eleminiert werden.
Ausgang mit Trennstufe, Buffered Output
Um sicherzustellen, dass ein Sensor an beliebige Messgeräte angeschlossen werden kann, ohne das Signal des Sensors zu beeinflussen, wird ein Trennverstäker zwischen Sensorausgang und Meßgeräteingang geschaltet. Der Trennverstärker dient dazu das Sensorsignal zu reproduzieren, ohne die Quelle zu belasten und schützt das Signal gegenüber impedanzbedingten Verfälschungen.

Idealerweise sollte die Ausgangsimpedanz eines Sensors fast null und die Eingangimpedanz des Messgeräts unendlich hoch sein, damit solche Verfäschungen nicht vorkommen.
Schließt man hingegen einen Sensor mit einer hohen Ausgangsimpedanz an ein Messinstrument mit niedriger Eingangsimpedanz an, so misst dies nur einen Bruchteil des Sensorsignals. Beispielsweise ist bei einer Ausgangsimpedanz des Sensors von 100 kOhm und einer Eingangsimpedanz des Messgeräts von 500 Ohm das resultierende Signal = 500/(100.000+500) = nur ca. 0.5% des eigentlichen Signals!
In so einem Fall ist es sinnvoll einen Trennverstärker mit hohem Eingangs- und niedrigem Ausgangswiderstand zwischen Sensor und Messgerät zu schalten.
Aussteuerungsbereich
-> Übertragungsbereich
Autoleistungsdichte (Autoleistungsspektrum)
Die Autoleistungsdichte eines Signals x(t) gibt an, wie die Leistung eines Signals auf die einzelnen Frequenzen verteilt ist, und wird als Mittelwert der Betragsquadrate der bezogenen Fourier Transformierten aller Einzelversuche ermittelt. Üblicherweise wird zwischen 8 und 64 Einzelversuche gemittelt.
Die Autoleistungsdichte ist eine reelle Funktion, die stets positiv ist und beinhaltet keine Phaseninformation. Die Autoleistungsdichte kann durch die FFT der Autokorrelationsfunktion ermittelt werden.
-> Kreuzkorrelationsfunktion
-> Kreuzleistungsdichte (Autoleistungsspektrum)
-> Erwartungswert
-> Verteilungsdichte
-> Verteilungsfunktion
Bandbreite
Die Bandbreite ist der Frequenzbereich, in dem elektrische Signale mit einem definierten Amplitudenabfall übertragen werden.
Typische Werte für diesen Amplitudenabfall sind 3 dB, 5% (0,5 dB) und 10%.

Manchmal wird der empfohlene dynamische Bereich eines ungedämpften Sensors (10 bis 30 % von der Resonanzfrequenz) auch Bandbreite genannt.
-> Frequenzgang
-> Kennlinie
Basisgrößen -> Einheiten, SI-Basisgrößen
Berstdruck
Der Berstdruck ist der Druck, bei dem es zur Zerstörung des Messwertaufnehmerns (vor allem bei Druckaufnehmern) kommen kann. Daher darf dieser Druck keinesfalls überschritten werden. Allerdings kann es bereits bei Drücken unterhalb des Berstdrucks zu dauerhaften Änderungen der Spezifikationen kommen.
-> Überlastbarkeit
-> Überlastbarkeit ohne Zerstörung
-> Prüfdruck
Beschleunigung
Beschleunigung ist definiert als Änderung der Geschwindigkeit pro Zeiteinheit (a = dv/dt).
-> Schock
-> Schwingung
-> Vibration
Beschleunigung-Winkel-Beziehung
Beschleunigungsaufnehmer mit niedrigen Messbereichen (±1 bis ±3g) können auch als Neigungssensoren
eingesetzt werden.
Die Neigung errechnet sich aus dem Arkussinus der Beschleunigung (siehe untere Abbildung).
Da das Ausgangssignal eines Beschleunigungsaufnehmers proportional zur Beschleunigung (und nicht zum Winkel) ist:
=> Beschleunigung (g) = m*V,
wobei V die um den nullpunkt korrigiertes Ausgangsspannung (Vaus-Voffset), und m= 1/Sensitivität ist,
-> Beschleunigung (g) = (Vaus-Voffset)/Sensitivität
-> Gyroskopischer Effekt
Daraus ergibt sich für Neigungssensoren:
Neigung(°) = arcsin((Vaus-Voff)/Sensitivität)

Das rote Rechteck repräsentiert den Beschleunigungsaufnehmer.
Diese Art der Darstellung nennt man auch Zeigerdiagramm
Beispiel: Nehmen wir einen 2g Sensor der mit 5 V gespeist wird, ein Offset von 2,5V hat und ein Ausgangsspanne von ±1,1V
1,1V enstpricht also 2 g, sodass wir eine Sensitivität von 0,55V/g haben
Ist der gemessene Ausgang 2,775V erhalten wir:
Neigung= Arcsin((2,775-2,5)/0,55) = 30°.
WICHTIG: Wird ein Beschleunigungsaufnehmer als Neigungssensor eingesetzt ist folgendes zu beachten:
Beschleunigungssensoren können nicht zwischen Ursachen einer Beschleunigung unterscheiden. Der Einfluss von Stößen und Vibrationen kann durch einen Tiefpass Filter weitgehend eliminiert werden. Alle Beschleuniungen die aber unter der Grenzfrequenz des Tiefpass Filters liegen, werden auch gemessen.
Es ist also phyikalisch nicht möglich langsame Beschleunigungen (Beschleunigung/Bremsen eines Fahrzeugs, Fahren in eine Kurve, etc.) von Neigung zu unterscheiden.
Eine Neigung verursacht Beschleunigungen von maximal ±1g. Es ist trotzdem nicht sinnvoll, Signale die außerhalb von ±1g liegen zu vernachlässigen, denn es könnte sich um eine Signlalüberlagerung handeln, verursacht durch Neigung und Bewegungsdynamik.
Zusammenfassend kann man sagen, dass es sinnvoll ist Neigungssensoren grundsätzlich mit einem Tiefpass Filter mit niedriger Grenzfrequenz zu versehen.
Wie der folgenden Abbildung entnommen werden kann, ist der Zusammenhang zwischen Beschleunigung und Winkel im Bereich ±30° nahezu linear.
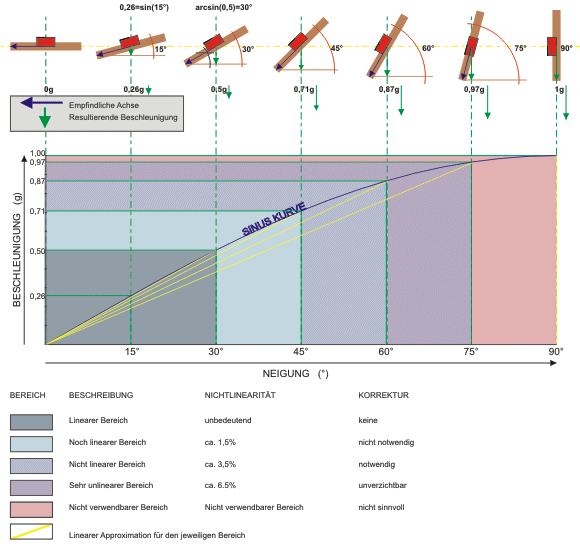
Ab 60° wäre eine Korrektur der Nichtlinearität notwendig, ab 75° kann ein Beschleunigungsaufnehmer auch mit einer Korrektur der Nichtlinearität nicht sinnvoll eingesetzt werden.
Um über 75° zu messen, braucht man zwei Sensoren (bzw. einen biachsialen Sensor), mit zwei Messachsen, die um 90° zueinander verkippt sind. Das Signal kann so miteianader verrechnet werden, sodass ein kontinuierlisches Signal von 0 bis 360° entsteht.

Beschleunigungsaufnehmer

Ein Beschleunigungsaufnehmer ist ein Messwertaufnehmer zur Messung von Beschleunigungen, die bei Bewegung oder Vibration entstehen. Wird er beschleunigt, so wirkt auf die in ihm montierte seismische Masse eine Kraft, die proportional zur Beschleunigung ist (F=m*a). Diese Kraft verformt das sensitive Element des Sensors. Diese Verformung wird in ein zur Beschleunigung proportionales Signal umgesetzt.
Wird ein Beschleunigungsaufnehmer auf eine Struktur montiert, um deren Schwingeigenschaften zu messen, sollte darauf geachtet werden, dass die Masse des Sensors nicht höher als 1/10tel die des Objektes ist. Sonst ist die Verfälschung des Ergebnisses durch die Sensormasse nicht vernachlässigbar: Dieser Verfälschung des Ergebnisses wird 'Mass-Loading' genannt
-> Feder-Masse-System
-> Modalanalyse
-> Schwingungsanalyse
-> Sensormontage, Beschleunigungsaufnehmer
-> Strukturanalyse
Beschleunigungsaufnehmer, induktiv
Induktive Beschleunigungsaufnehmer werden nur noch selten benutzt und zunehmend durch kapazitive Beschleunigungsaufnehmer und piezoresistive Beschleunigungsaufnehmer ersetzt.
Beschleunigungsaufnehmer, kapazitiv
Kapazitive Beschleunigungsaufnehmer bestehen aus zwei festen Kondensatorplatten und einer seismischen Masse als bewegliche Kondensatorplatte, die sich zwischen den festen Kondensatorplatten bewegen kann.
Beschleunigungsaufnehmer, MEMS
Bedingt durch Fortschritte in der Mikromechanik und die damit verbundene Kostenoptimierung, werden viele kapazitive und piezoresistive Beschleunigungsaufnehmer mikromechanisch gefertigt.
Hierbei werden die mechanischen Strukturen bestehend aus einer seismischen Masse, die von ein, zwei oder vier Biegebalken getragen wird, und die Schutzkappen mikromechanisch geätzt.

Die oberen und unteren Siliziumschichten dienen als mechanische Anschläge und schützen den Sensor vor starken Überlastungen. Das dünne Luftpolster zwischen seismischer Masse und Schutzkappe wirkt als mechanisches Tiefpassfilter, und verhindert dass die seismische Masse im Resonanzbereich schwingt.

Bei den piezoresistiven Beschleunigungsaufnehmern werden die piezoresistiven Widerstände direkt durch Ionenimplantation in die Biegebalken integriert. Die Widerstände werden als Vollbrücke geschaltet.
Bei kapazitiven Beschleunigungsaufnehmern führt eine auftretende Beschleunigunung zu einer Änderung der Position der seismischen Masse und somit zu einer Änderung der Kapazitäten der beiden Kondensatoren.
Diese Kondensatoren (C1 und C2) bilden zusammen mit zwei festen Kondensatoren eine Brückenschaltung. Die Brückenschaltung wird von einer konstanten Wechselspannung gespeist. Eine Änderung der Kapazitäten führt zu einer Verstimmung der Brücke und es entsteht eine amplitudenmodulierte Wechselspannung. Dieses Signal wird gleichgerichtet und verstärkt und man erhält ein zur Beschleunigung proportionales Ausgangssignal.
-> Beschleunigungsaufnehmer, MEMS-Servo
Beschleunigungsaufnehmer, piezoelektrisch
Piezoelektrische Beschleunigungsaufnehmer basiern auf dem piezoelektrischen Effekt..
Die seismische Masse wird auf einem piezoelektrischen Quarz montiert. Eine Beschleunigung bewirkt eine Belastung des Quarzes und erzeugt so ein Ladungsverteilung, die durch geeignete Elektronik (IEPE-Schaltkreis) in ein zur Beschleunigung proportionales Spannungssignal gewandelt wird.
Beschleunigungsaufnehmer ohne einen internen IEPE-Schaltkreis haben einen reinen Ladungsausgang.
Eine externe Elektronik wird also benötigt, um ein zur Beschleunigung proportionales Spannungssignal zu erzeugen.
IEPE-Beschleunigungsaufnehmer haben diese Elektronik im Sensorgehäuse integriert.
Der Messbereich eines piezoelektrischen Beschleunigungsaufnehmers kann mit Hilfe der seismischen Masse oder mit Hilfe der Elektronik eingestellt werden.
Es gibt mehrere Bauarten piezoelektrischer Beschleunigungsaufnehmer:
Kompressionsbauform (Compression-Mode)

Hierbei ist der Quarz direkt zwischen Montageplatte und seismischer Masse montiert. Er wird mit Druck belastet (longitudinaler piezoelektrischer Effekt).
Scherbauform (Shear Mode)
Hierbei ist der Quarz nicht direkt zwischen Montageplatte und seismischer Masse montiert, sondern wird auf Scherung beansprucht (transversaler piezoelektrischer Effekt).
Bei Temperaturänderungen oder Biegebeanspruchung der Grundplatte (Sockeldehnung) sind kleinere Meßfehler als bei der Bauform "Compression-Mode" zu erwarten.
Planar-Scherbauform (Planar Shear Mode)

Montage mittels Klemmring:
Hierbei werden die Sensorelemente wie seismische Masse, Piezokristall und Elektroden einfach zusammengelegt (statt zusammengeschraubt oder geklebt) und dann im Ofen mittels eines äußeren Vorlastrings fixiert.
Vorteile der Klemmmontage:
- bessere und wiederholbare Dynamikeigenschaften
- Klebstoff wird nicht benötigt, sodass höhere Temperaturen möglich sind
- der Vorlast is damit nicht so willkürlich wie bei geschraubter Montage
Azimut-Scherbauform (Annular Shear Mode)

Hierbei werden die Sensorelemente wie seismische Masse, Piezokristall und Elektroden kreisförmig angeordnet
Biegebauform (Flexular Mode)

Hierbei wird der Quarz auf ein Biegebalken montiert und auf Biegung beansprucht.
Diese Bauform ist unempfindlich gegen Querbeschleunigungen und wird meistens für seismische Anwendungen eingesetzt. Die Bandbreite ist niedriger als bei Sensoren mit Kompressionsbauform und Scherbauform.
Piezoelektrische Beschleunigungsaufnehmer sind nicht für statische Anwendungen geeignet. Bei dynamischen Anwendungen liegt die obere Grenzfrequenz je nach Bauform zwischen 5kHz und 30kHz.
Die untere Grenze wird durch die Entladezeitkonstante bestimmt.
Die obere Grenze wird durch die Resonanzfrequenz bestimmt.
Beschleunigungsaufnehmer, piezoresistiv
Piezoresistive Beschleunigungsaufnehmer basieren prinzipiell auf den unter "Beschleunigungsaufnehmer" beschriebenen Prinzip.

Eine auftretende Beschleunigung bewegt die seismische Masse und die folgende Krümmung der Biegebalken führt zu einer Änderung der Widerstände der Dehnungsmessstreifen, und somit zu einer Verstimmung der Wheatstoneschen Messbrücke. Die Brückenschaltung liefert ein zur Beschleunigung proportionales Signal.
Piezoresistive Beschleunigungsaufnehmer sind geeignet für Anwendungen zwischen 0 Hz (statische Beschleunigung) und 2 kHz. Wobei die obere Grenzfrequenz abhängig vom Messbereich ist.
Um zu verhindern, dass diese Beschleunigungsaufnehmer im Resonanzbereich schwingen, können sie mit Öl gefüllt werden, um sie kritisch zu dämpfen (-> Öldämpfung).
Beschleunigungsaufnehmer, Servo
Servobeschleunigungsaufnehmer, auch Krafkompensierte Beschleunigungsaufnehmer genannt, erkennen die Bewegung der seismischen Masse, und erzeugen durch ein Signal eine Rückstellungskraft, um die Masse im ursprünglichen neutralen Zustand zu halten.

Traditionell wird die Rückstellungskraft durch Schwingspulen erzeugt. Der Strom der durch die Spulen fließt, ist proportional zur Beschleunigung. Bei den moderneren kapazitiven MEMS Sensoren, wird das Rückkopplungsignal elektrostatisch erzeugt.
Durch die Kraftkompensierung kann eine deutlich höhere Auflösung und Genauigkeit erreicht werden; daher werden die Sensoren für seismische Datenüberwachung eingesetzt, beispielsweise für Erdbebenerkennung und Bewegungserkennung und -Identifizierung.
Servo-Beschleunigungsaufnehmer, MEMS
Hier wird ein mikromechanisch gefertigter kapazitiver Beschleunigungsaufnehmer eingesetzt.

Eine Beschleunigung der seismischen Masse führt zu einer Kapazitätsänderung durch die Bewegung der Masse zwischen den Abdeckkappen. Diese Änderung wird durch einen eingebauten ASIC in eine Spannung umgerechnet, und wird an den Abdeckkappen angelegt um die seismische Masse in neutraler Position zu halten. Die elektostatisch erzeugte Rückkopplungsspannung ist proportional zur Rückstellungskraft und somit zur Beschleunigung.
MEMS-Servobeschleunigungsaufnehmer haben viele Vorteile: Sie sind preiswerter, sie sind viel robuster als magnetische Servobeschleunigungsaufnehmer da die Aufhängung nicht so empfindlich ist, Magnete und Spulen werden nicht benötigt und elektromagnetische Störungen können fast eliminiert werden.
Betriebsdruck
Betriebsdruck in einer geschlossenen Anlage ist der Anteil des statischen Drucks, der während des Betriebs der Anlage erzeugt wird und nicht aus dem Eigengewicht des Mediums resultiert. -> Druck
Betriebsfestigkeit
Die Betriebsfestigkeit beschreibt die Lebensdauer eines Gegenstands während seiner Verwendung.
Dazu werden Tests mit definierten wirklichkeitsnahen Belastungen durchgeführt, um eine ausreichende Sicherheit während der geforderten Nutzungszeit zu gewährleisten und dabei eine wirtschaftliche Konstruktion zu ermöglichen.
Die Belastungen können beispielsweise Kräfte, Drehmomenten, Strömen, Spannungen, und die Behandlung mit chemischen Substanzen sein.
Die Ergebnisse unterliegen meist großen Unsicherheiten.
-> Modalanalyse
Betriebsschwingformanalyse (ODS Operating Deflection Shapes Analysis)
Bei der ODS werden die Schwingungsmuster eines Prüflings ermittelt, die während des Betriebs auftreten. Dabei werden Messungen (Weg, Beschleunigung, Geschwindigkeit) an einer Vielzahl von Punkten durchgeführt und die Bewegung der Struktur beispielsweise als animiertes Modell dargestellt.
In der Betriebsschwingformanalyse wird nur das Antwortsignal analysiert und nicht das Verhältnis der Antwort- und Erregersignale wie in der Modalanalyse.
Sie erfolgt in der in der Entwicklungsphase vor einer detaillierten Modalanalyse um diese gezielter durchführen zu können.
Man unterscheidet zwischen
Zeit-ODS in der alle Frequenzen und
Spektral-ODS in der nur bestimmte Frequenzen berücksichtigt werden.
-> Antwortfunktion
Betriebstemperaturbereich
Der Betriebstemperaturbereich ist die Temperaturspanne, in der ein Messwertaufnehmer in Betrieb genommen werden kann, ohne bleibende Änderung der technischen Spezifikationen. Wird der Messwertaufnehmer jedoch außerhalb des kompensierten Temperaturereichs betrieben, werden die Spezifikationen unter Umständen während dessen nicht eingehalten.
-> kompensierter Temperaturbereich
-> Temperaturkoeffizient
bewegte Masse
Die bewegte Masse ist die Masse eines Systems, in dem ein Kraftaufnehmer integriert ist, die sich bei Krafteinleitung bewegt. Zusammen mit der Steifigkeit wird sie benötigt, um die Resonanzfrequenz des Systems und somit die Bandbreite der erhaltene Messsignale zu ermitteln. Ist der Sensor nicht in einem System integriert, spricht man von der Eigenmasse.
Bitrauschen
Liegt ein Bereich eines Analogsignals unterhalb der niedrigsten auflösbaren Spannung (->LSB, Least Significant Bit) bei der A/D-Wandlung, so erzeugt der A/D-Wandler ein trapezförmiges Rauschsignal, dessen Amplituden-Stufen einem Bit, bzw. der kleinsten detektierbaren Spannung entsprechen.

Die obige Abbildung zeigt ein typisches "Bit-Rauschen"-Signal. Man erkennt es durch den zackigen Kurvenverlauf, der an keiner Stelle eine kontinuierliche Kurve ist.
Bit-Rauschen wird verursacht durch:
a) eine zu niedrige Auflösung (z.B. Einsatz eines 12-Bit statt 16-Bit AD Wandler)
b) eine zu niedrige Verstärkung des Analogsignals
und nicht durch den Sensor!

Hier erkennt man, dass das Sensorsignal nicht verrauscht ist. Der Signalverlauf wurde jedoch mit einem Digitaloszilloskop aufgenommen.
Digitaloszilloskope besitzen meistens eine Auflösung von 8 Bit. Dies bedeutet, dass der gesamte Bereich in 28, also 256, Teile aufgeteilt wird. Die Mitte ist Bit 128 und entspricht einer Amplitude von 0. Der in der Abbildung dargestellte Abschnitt des Signals verläuft zwischen Bit 127 und 129.
Da die kleinste darstellbare Einheit eines AD-Wandlers 1 Bit ist, muss das Oszilloskop an jeder abgetasteten Stelle des Signals entscheiden, welchem Bit die Amplitude zugeordnet wird. In diesem Beispiel den Bits 127, 128 oder 129. Dadurch entsteht das typische Bit-Rauschen-Muster.
Analogoszilloskope haben den Vorteil, dass man den tatsächlichen Signal-Verlauf sieht. Würde man also das Signal mit einem Analogoszilloskop darstellen, erhielte man auch kein verrauschtes Signal.
Kombinierte Analog-Digital Oszilloskope sind daher vorteilhaft. Hier kann man entweder die Signalverläufe digital aufzeichnen und auswerten oder das Bit-Rauschen vermeiden, in dem man den Signalverlauf analog darstellt.
Bode-Diagramm
Ein Bode-Diagramm stellt Amplitude und Phase einer Messgröße in Abhängigkeit der Frequenz dar.
Ein Beispiel ist das Frequenzverhalten der Amplitude und Phase eines Butterworth-Filters
Ein weiteres Beispiel ist die Darstellung des Einflusses der Entladezeitkonstante
auf die untere Grenzfrequenz eines piezoelektrischen
Sensors in abhängigkeit der Dämpfung
.


-> Entladezeitkonstante
Der Zusammenhang zwischen Phase und Amplitude kann am besten mit einem Zeigerdiagramm erklärt werden:

-> Beschleunigung-Winkel-Beziehung
Eine Bemerkung zum Signalverlauf bei einer Verpolung - also Polaritätsumkehr (Phase Reversal) oder Vorzeichenumkehr des Amplitudenverlaufs: eine Phasenverschiebung um 180° und eine Phasenumkehr sind - außer bei einem sinusförmigen Signal - nicht identisch. Dies kann mit einem Sägezahnsignal verdeutlicht werden:

Bonden, Bonddrähte
Das Bonden (Englisch: Bonding) ist das Verfahren mit der Bonddrähte (sehr dünne Drähte aus Gold oder Aluminium, 10 bis 25 Mikrometer dick) und/oder die Anschlußflächen von mikroelektronischen Bauelementen wie Chips mit Leiterbahnen einer Leiterplatine verbunden werden.
Bruchlast
Die Bruchlast stellt die Sicherheitsgrenze bei Messwertaufnehmern (vor allem bei Kraftaufnehmern) dar. Bei Überschreitung der Bruchlast kann es zur Zerstörung des Aufnehmers kommen.
-> Überlastung
-> Überlastbarkeit
Brücke
-> Wheatstonesche Messbrücke
Brückenschaltungen

-> Wheatstonesche Messbrücke
-> Brückenschaltung mit Sense-Leitung
-> Netzteil, bipolar
Brückenverstärker
-> Wheatstonesche Messbrücke
-> Netzteil, bipolar
-> Brückenschaltung mit Sense-Leitung
BSL (Best Straight Line)
BSL ist die Bezeichnung für die bestapproximierte Gerade, die durch die MessPunkte gelegt werden kann. (Für die Anpassung durch nichtlinearen Funktionen siehe die allgemeine Diskussion über Kurvenanpassung
Geradengleichung der BSL:
y = mBSL · x + c
wobei
c = Offset und
mBSL = durch lineare Regression errechnete Steigung der bestapproximierten Gerade ist, mit
| mBSL= | Σ | n | (xi-xav)·(yi-yav) | |
| i=1 | ||||
| Σ | n | (xi-xav)2 | ||
| i=1 | ||||
wobei
n = Anzahl der Punkte
i = laufender Index
xi = i-ter x-Wert in phys. Einheiten (z.B. Newton)
yi = i-ter y-Wert in mV
xav = arithmetisches Mittel der x-Werte
yav = arithmetisches Mittel der y-Werte
Bemerkung zur Steigung:
Die Steigung mBSL ist in mV/phys.Einheit (z.B. mV/N) und beschreibt die Sensitivität oder Empfindlichkeit des Sensors.
Für DMS-basierte Sensoren bzw. Sensoren mit ratiometrischem Ausgang wird die Sensitivität oft in mV/V angegeben.
Die Steigung in mV/V = mBSL · Messbereich / Speisespannung.

BSLTZ (Best Straight Line Through Zero)
Bezeichnung für die beste approximierte Gerade, die durch die Punkte einer
nichtlinearen Kennlinie und den Nullpunkt des Koordinatensystems gelegt werden kann.
Bürde
Die Bürde gibt den Wert des gesamten Widerstandes an, mit dem ein Ausgang eines Gerätes belastet wird.
Wichtige Angaben sind beim Spannungsbetrieb die minimale Bürde und beim Strombetrieb die maximale Bürde.
Chip
-> IC
Coriolisbeschleunigung, Corioliskraft
Damit eine Masse m sich auf ein rotierendes Objekt (blau) relativ zur Erde (hellgrau)
gradlinig von der Mitte bis zum Rand bewegen kann, muss die tangentiale Geschwindigkeit zunehmen.

Die tangentiale Geschwindigkeitsänderung ist die Coriolis-Beschleunigung und verursacht die Corioliskraft (benannt nach dem französichen Mathematiker Gaspard G. de Coriolis).
-> Gyroskop, MEMS
DAkkS - Deutsche Akkreditierungstelle
Die Deutsche Akkreditierungstelle (DAkkS) akkreditiert und kontrolliert Kalibrierlaboratorien in Industrieunternehmen, Forschungsinstituten, technischen Behörden, Überwachungs- und Prüfinstitutionen.
-> DKD - Neuer Deutscher Kalibrierdienst
-> DKD - Internetpräsenz
-> Homepage der DAkkS
-> Homepage der PTB
-> Kalibrierung
-> Gesamtgenauigkeit
-> Nichtlinearität
-> Kalibrierung bei 50% vom Nennbereich
-> Wiederholbarkeit
-> Hysterese
-> thermisches Verhalten
-> thermische Nullpunktverschiebung
-> thermische Sensitivitätsänderung
Datenerfassungskarte
Mit Hilfe einer Datenerfassungskarte können elektrische Signale so digitalisiert werden,
dass sie mit einem PC weiterverarbeitet werden können.
Sie gibt es als Bauform für PCI-Steckplätze und auch als PCMCIA-Karten zum Einsatz in Notebooks.
Wichtige technische Merkmale einer Datenerfassungskarte sind:
- Eingangsspannungsbereich
- Auflösung
- Abtastrate
- Anzahl der erfassbaren Kanäle
- Betriebsart: "single endend" oder "differentiell"
Die mögliche Abtastrate ist entscheident für die Erfüllung des Nyquist Theorems.
Es muss beachtet werden, ob die Abtastrate für jeden Kanal oder als Summenabtastrate angegeben ist. Ist letzteres der Fall, ergibt sich die Abtastrate eines Kanals, indem man die Summenabtastrate durch die Anzahl der Kanäle dividiert.
Wird auf die zeitgleiche Erfassung mehrerer Kanäle Wert gelegt, muss dies bei der Auswahl der Messwerterfassungskarte berücksichtigt werden. Die meisten (preisgünstigeren) Messwerterfassungskarten besitzen lediglich einen A/D-Wandler und schalten zwischen den verschiedenen zu digitalisierenden Kanälen um. Dieses "Multiplexen" genannte Verfahren ist jedoch offensichtlich für die exakt zeitgleiche Erfassung mehrerer Kanäle nicht geeignet.
Dazu sind zwingend mehrere A/D-Wandler auf einer Messwerterfassungkarte notwendig.
Datenlogger
Datenlogger arbeiten im Prinzip wie Datenerfassungskarten und es gelten auch die dort erwähnten technischen Zusammenhänge.
Allerdings werden Datenlogger als externe Geräte konzipiert und bieten die Möglichkeit, die anfallenden digitalen Daten zu speichern. Dazu ist kein PC notwendig, da die notwendige Elektronik im Datenlogger integriert ist. So können Signale zunächst mit einer hohen Abtastrate erfasst und später dann relativ langsam in einen PC übertragen werden. Die Datenübertragung geschieht häufig über eine IEEE-Schnittstelle, aber auch RS-232- oder USB-Anschlüsse sind möglich.
Dehngrenze (Rp)
Falls es keinen ausgeprägten Übergang vom elastischen in den plastischen Bereich gibt, spricht man von einer Dehngrenze, ansonsten spricht man von der Streckgrenze. Sie ist die Spannung, bei der die erste bleibende Verformung auftritt.
Dehngrenze Rp0,2: 0,2 % bleibende Verformung
-> Durchbiegung
-> Elastizitätsgrenze
-> Hookesches Gesetz
-> inelastischer Bereich
-> Streckgrenze
-> technische Elastizitätsgrenze
Dehnung
Die Dehnung ist die relative Längenänderung (d=dL/L) eines Körpers.
-> Dehngrenze
-> Durchbiegung
-> Elastizitätsgrenze
-> Hookesches Gesetz
-> inelastischer Bereich
-> Steifigkeit, k
-> Streckgrenze
-> technische Elastizitätsgrenze
Dehnungsempfindlichkeit
Die Dehnungsempfindlichkeit gibt bei Beschleunigungsaufnehmern an, um welchen Wert sich der Messwert bereits durch Verformungen des Montagesockels
ändert, ohne das tatsächlich eine Beschleunigung vorliegt. Die Dehnungsempfindlichkeit wird typischerweise in g/nm/mm angegeben.
Dezibel (dB)
1 dezi-Bel = 1/10 Bel (Dezi=1/10)
Das Bel ist definiert als der dekadische Logarithmus des Verhältnisses zweier Leistungen P1 und P2: lg(P1/P2)
1Bel = 10 dB = ergibt sich wenn P1 / P2 = 10 ist.
=> Leistungsvergleich L in dB = 10*lg(P1/P2)
________________________
P1/P2 dB
------------------------
10000 (10e+4)| 40
100 (10e+2)| 20
10 (10e+1)| 10
1 (10e 0)| 0
0,1 (10e-1)| -10
0,01 (10e-2)| -20
0,0001 (10e-4)| -40
Werden aber Spannungen statt Leistungen betrachtet - wie beispielsweise bei
Frequenzspektren mit der Angabe ±3dB - so ergibt sich, da P=U2/R:
10*lg(P1/P2) =10*lg(U12/U22 * R2/R1)
Da folgende logarithmische Rechenregeln gelten:
lg(U2) =2*lg(U)
lg(U*R) = lg(U) + lg(R)
lg(R2/R1)=-1*lg(R1/R2)
=> 10*lg(U12/U22*R2/R1)= 20*lg(U1/U2) - 10*lg(R1/R2)
= 20*lg(U1/U2), da R1=R2, (Bezugswiderstände der Leistungen sind meistens gleich)
=> Spannungsvergleich S in dB = 20*lg(U1/U2)
Wird der Spannungsvergleich prozentual betrachtet
=> Prozentualer Spannungsvergleich x% in dB = 20*lg(x/100)
da für x% von einer Spannung => U1/U2 = x/100
Will man aber jetzt eine Zu- oder Abnahme von x% eines Wertes berechnen, also
U1 = U2+x%*U2 =U2(1+x/100) => U1/U2 = (1+x/100)
=> Prozentuale Spannungsveränderung x% in dB = 20*lg(1+x/100),
wobei x negativ ist wenn die Ausgangsspannung kleiner als die Eingangsspannung ist.
Beispiele: +5% Abweichung: 20*lg(1+0,05) = 0,424 dB
-5% Abweichung: 20*lg(1-0,05) = -0,446 dB
_________________ %Abweichung dB ----------------- +5 | 0,4 +10 | 0,8 +15 | 1,2 +41,3 | 3 +100 | 6 +900 | 20

Zusammenfassend: Leistungsvergleich L: 10*lg(P1/P2) dB Spannungsvergleich S: 20*lg(U1/U2) dB Spannungsvergleich x%: 20*lg(x/100) dB Spannungsabweichung x%: 20*lg(1+x/100)dB
Dielektrikum
Ein Dielektrikum ist ein Medium (Gas, Flüssigkeit oder Feststoff), der beim Anlegen eines elektrischen Feldes polarisiert wird.
Dies liegt daran, dass die Ladungsträger darin sich nicht frei bewegen können. Daher sind diese Medien auch nur schwach oder nicht-leitend
Die durch diese Polarisation erzeugte dielektrische Leitfähigkeit wird Permittivität (Ep) genannt, und beschreibt also die Durchlässigkeit für elektrische Felder.
εp=E/D, wobei E das angelegte elektrische Feld ist und D das von E erzeugte und ihm entgegengerichtete elektrische Feld
εp setzt sich aus ε0 (Permittivität des Vakuums) und εr (relative Permittivität des Materials) zusammen
εp=ε0 x εr
Wobei Vakuum als Referenzmaterial mit εr=1 definiert ist.
Beispiele für εr:
Vakuum = 1
Petroleum = 2
Gummi = 2,5 bis 3
Glas = 6-8
Wasser (1THz, 0°C) =4
Wasser (1THz, 20°C) =6
Wasser (0Hz, 20°C)= 80
Wasser (0Hz, 0°C)= 88
Dichtung, Epoxy
Epoxidharz wird zur Abdichtung von Sensoren und messtechnischer Bauelemente verwendet. Hierbei enstehen aus Polymeren, unter Zugabe von Härter, chemisch beständige Kunststoffe von hoher Festigkeit, die nicht mehr verformt werden können.
Dichtung, Silikon
Silikonelastomere sind im Gegensatz zu Epoxidharzen elastisch. Sie werden als Schutz- und Dichtungsmittel für empfindliche Bauteile verwendet, die Elastizität voraussetzen.
Bei RTV-Silikonelastomeren handelt es sich um Raumtemperaturvernetzendes Silikon (RTV = Room Temperature Vulcanizing)
RTV-Silikonelastomere werden beispielsweise für die Abdichtung frontbündiger Sensormembranen verwendet, dessen Beweglichkeit nach der Abdichtung erhalten sein muss. Es wird weiterhin zwischen Ein- und Zweikomponentensystemen (RTV-1/RTV-2) unterschieden.
HTV-Silikonelastomere (= High Temperature Vulcanizing) sind wärmebeständiger. Sie sind auch zwischen -40 und 250 °C elastisch.
Dichtring, selbstzentrierender

Selbstzentrierende Dichtringe sind eine Kombination aus Unterlegscheibe und einer Dichtlippe aus Nitril oder Viton (FKM, Fluor Kautschuk).
Der Dichtring wird wie eine Unterlegscheibe eingesetzt.
Durch Anziehen der Verschraubung wird die Dichtlippe an die abzudichtenden Planflächen angepresst.
Diese Dichtringe werden häufig bei frontbündigen Druckaufnehmern eingesetzt, weil sie einfacher anzuwenden sind als O-Ringe. Der Schraubkopf benötigt keine Nut, um den O-Ring zu befestigen und zu zentrieren - eine plane Fläche ist ausreichend.
->Sensormontage, Druckaufnehmer
Dickschichttechnik
Die Dickschichttechnik ist ein Verfahren der Mikroelektronik, um kleine passive Bauelemente zu produzieren. Dabei werden die gewünschten Formen auf das Grundmaterial gedruckt und eingebrannt. Auch Sensorelemente für Drucksensoren lassen sich so realisieren. Die Produktion noch kleinerer Strukturen ist mit Hilfe der Dünnschichttechnik möglich.
Differenzdruck
Der Differenzdruck ist die allgemeine Bezeichnung für den Unterschied zwischen zwei Drücken.
-> Systemdruck
-> Gleichdruckeffekt
Digitalanzeige
Digitalanzeigen sind prinzipiell Geräte, die einen elektrischen Spannungswert als Zahl auf einem Display darstellen.

In der Signalverarbeitung bezeichnet dieser Begriff das zu einem Sensor gehörenden Anzeigegerät.
Dazu beinhaltet die Digitalanzeige neben dem eigentlichen Display sowohl eine Spannunsgversorgung für den Sensor als auch einen Messverstärker. Dieser wird so an den Sensor angepasst, dass der auf dem Display angezeigte Wert nicht der gemessenen Ausgangsspannung des Sensors, sondern dem tatsächlichen Wert der Messgröße entspricht.
Bestimmte Arten von Digitalanzeigen gestatten es, den Messwert zusätzlich auch über eine RS-232-Schnittstelle auszulesen.
Zu beachten ist in diesem Zusammenhang jedoch, dass die Messwertanzeige und -ausgabe lediglich mit wenigen Hz erfolgt. Daher kann es hierbei leicht zu Aliasingeffekten kommen.
Digitalisierung
-> A/D-Wandlung
Dirac-Stoß, Delta-Funktion
Unter einem Dirac-Stoß versteht man einen sehr kurzen aber sehr hohen Impuls, der mathematisch mit der Delta-Funktion beschrieben wird.

Dirac-Stöße regen Strukturen bis in sehr hohe Frequenzen an, da das Signal über alle Frequenzen verteilt, die gleiche Leistung hat - also eine konstante spektrale Leistungsdichte.
δa(x)=1/(π⋅a) ⋅ e -(x2/a2)
a ->0 wird dies unendlich kurz und hoch.
-> Weißes Rauschen
-> Impulshammer
-> Motorklopfen
-> Ventilschlag
DKD - Neuer Deutscher Kalibrierdienst
Seit 2010 ist die Akkreditierungsstelle des Deutschen Kalibrierdienstes (DKD) in die DAkkS - Deutsche Akkreditierungstelle übergegangen.
1977 wurde der DKD zur Entlastung der Physikalisch-Technischen Bundesanstalt (PTB) gegründet, mit der er unter dem Dach des zuständigen Bundesministeriums kooperierte.
Diese Kooperation und die Arbeit mit den Fachausschüssen als technische Gremien bei der PTB wird ab Mitte 2011 als Neuer Deutscher Kalibrierdienst (DKD) fortgesetzt.
Mehr dazu ist unter unter http://www.dkd.eu/ zu finden.
-> DAkkS - Deutsche Akkreditierungstelle
-> Homepage der DAkkS
-> Homepage der PTB
DMS, Dehnungsmessstreifen

Dehnungsmessstreifen (DMS) sind Widerstände, deren Wert sich mit Dehnung ändert. DMS werden auf dem Messobjekt so appliziert, dass sie von ihm elektrisch isoliert sind, sich aber bei einer Belastung mitdehnen. DMS werden als Wheatstonesche Brücke geschaltet, sodass die Dehnung des DMS zu einer Verstimmung der Brücke führt und man so ein der Belastung proportionales Ausgangssignal erhält. DMS-Brücken bilden die Basis für viele Druck-, Kraft-, und Beschleunigungsaufnehmer.
Die durch die Dehnung hervorgerufene Widerstandsänderung basiert dabei auf zwei verschiedenen Effekten. Zum einen auf der Änderung der Geometrie des Leiters (Widerstand, elektrischer) und zum anderen auf Effekten auf atomarer Ebene (piezoresistiver Effekt).
Bei Folien-DMS überwiegt der erstgenannte Effekt, bei Halbleiter-DMS der zweite.
-> Folien-DMS
-> Halbleiter-DMS
-> Wheatstonesche Messbrücke
-> k-Wert
DMS-Sensoren Inbetriebnahme
Bei der Inbetriebnahme eines DMS-Sensors ist darauf zu achten, dass alle Hinweise in herstellerspezifische Anleitungen sowie weiterführende Informationen des Sensor-Datenblatts berücksichtigt werden.
Nachfolgend sind 6 Punkte aufgelistet, die bei der Inbetriebnahme wichtig sind:
1 Überprüfung der Aufnehmer vor dem ersten Anschluss
1.1 Allgemeines
 Versuchen Sie nie, durch unsachgemäßes Drücken, Ziehen, Verdrehen etc. Kraft, Druck oder Beschleunigung zu simulieren! Überlastungsgefahr!
Versuchen Sie nie, durch unsachgemäßes Drücken, Ziehen, Verdrehen etc. Kraft, Druck oder Beschleunigung zu simulieren! Überlastungsgefahr!Achten Sie auf die Überlastbarkeitsangaben im Kalibrierdatenblatt! Sensoren, die einen sehr niedrigen Messbereich haben, können schon beim Anfassen überlastet werden!
Das vermeintliche 'Überprüfen' von Druckaufnehmern durch Drücken der Membran mit den Fingern ist eine der häufigsten Ursachen für deren Überlastung.
Bitte beachten Sie, dass in einem solchen Fall der Garantieanspruch erlischt.
1.2 Optische Kontrolle
Äußere Beschädigung des Paketes vom Spediteur bzw. Fahrer schriftlich bestätigen lassen.
Nachdem Sie den Aufnehmer ausgepackt haben überprüfen Sie als erstes, ob er äußerliche Schäden aufweist.
1.3 Isolierung
Schließen Sie alle Anschlüsse außer der Abschirmung kurz.
Messen Sie den Widerstand zwischen diesen Anschlüssen und dem Gehäuse mit einem Multimeter.
Der Widerstand muss mindestens 100 M&Ohm; betragen.
1.4 Vermessung der Messbrücke
Bei Aufnehmern ohne Verstärker ist es möglich, den Widerstand der Messbrücke an der Ein- und Ausgangszuleitung zu überprüfen:
Die Prüfung erfolgt bei Raumtemperatur im nicht angeschlossenen Zustand, jeweils zwischen (+) und (-) der beiden Speiseanschlüsse sowie zwischen den beiden Ausgangsanschlüssen.

Der Widerstandswert ist dem Kalibrierzeugnis zu entnehmen.
Weicht der Widerstand um mehr als 10 % ab, so ist anzunehmen, dass der Aufnehmer nicht mehr funktionsfähig ist.
Die Widerstandswerte im Katalogdatenblatt sind nur Richtwerte und können von denen im Kalibrierzeugnis abweichen!
Bei Aufnehmern mit Verstärker ist eine Messung auf dieser Basis nicht möglich. Der Stromverbrauch eines Verstärkers sollte nicht zu hoch sein!
DMS-Inbetriebnahme-Anfang
2 Anschluss des Aufnehmers
 Der Aufnehmer sollte VOR der Montage angeschlossen werden. Der Nullpunktversatz (Offset) sollte dabei ständig beobachtet werden,
um eine mögliche Überlastung bei der Montage rechtzeitig erkennen zu können.
Der Aufnehmer sollte VOR der Montage angeschlossen werden. Der Nullpunktversatz (Offset) sollte dabei ständig beobachtet werden,
um eine mögliche Überlastung bei der Montage rechtzeitig erkennen zu können.Vor Anschluss des Sensors sollten Sie immer die Farbkodierung des Aufnehmers anhand des Kalibrierzeugnisses überprüfen.
Achten Sie insbesondere auf die Speiseverkabelung bei Aufnehmern mit Verstärker, um eine Verpolung auszuschließen:
Eine Verpolung der Speisespannung kann zur Zerstörung des Aufnehmers führen!
2.1 Unipolarer Anschluss
Diese Anschlussweise wird bei Aufnehmern ohne Verstärker oder mit integriertem bzw. externem Spannungs-verstärker mit unipolarer Speisung, z.B. 10 V verwendet.

Eine Verbindung der (–) Speisung mit dem (–) Ausgang (3 Leitertechnik) ist nur zulässig, wenn es ausdrücklich im Kalibrierzeugnis steht.
Die Verpolung der Speisespannung eines Aufnehmers mit Verstärker kann zu dessen Zerstörung führen, bei Aufnehmern ohne Verstärker wird dadurch lediglich das Ausgangssignal verpolt.
2.2 Bipolarer Anschluss
Diese Anschlussweise wird nur bei Aufnehmern mit integriertem oder externem Spannungsverstärker mit bipolarer Speisung, z.B. ±15 V benutzt.

Die Bezeichnung: 0 V, 0 V Common oder gemeinsames Nullpotential bedeutet, dass die 0 V Leitung des Netzteiles an das (–) des Ausgangssignals angeschlossen werden muss.
Die Verpolung der Speisespannung eines Aufnehmers mit Verstärker kann zu dessen Zerstörung führen!
2.3 4/20 mA Anschluss
Diese Anschlussweise wird nur bei Aufnehmern mit integriertem oder externem Stromverstärker benutzt.

DMS-Inbetriebnahme-Anfang
3 Nullpunkt-Offset
 Nach Anschluss der Speisung im unbelasteten Zustand läßt sich der Nullpunkt-Offset der Aufnehmer-Messbrücke messen.
Nach Anschluss der Speisung im unbelasteten Zustand läßt sich der Nullpunkt-Offset der Aufnehmer-Messbrücke messen.Ein Offset (Nullpunktverschiebung) im unbelasteten Zustand bedeutet nicht, dass der Aufnehmer von verminderter Qualität ist, denn ein absoluter Nullpunkt ist nicht erreichbar.
3.1 Typischer Offset
Bei Aufnehmern auf Halbleiter-DMS-Basis ohne Verstärker sind, falls im Kalibrierzeugnis nicht anders er-wähnt, charakteristische Nullpunkt-Offset-Werte bis zu ±15 mV möglich, bei Aufnehmern auf Folien-DMS-Basis liegen die Offset-Werte bei bis zu ±1 mV.
Bei Aufnehmern mit Verstärker werden die Offset-Werte mit verstärkt.
Bei Verstärkern, die mit einem Poten-tiometer versehen sind, lässt sich der Nullpunkt zusätzlich einstellen bzw. verschieben.
Bei manchen Aufnehmern mit Verstärker ist die Nulllage im unbelasteten Zustand auf zwischen etwa +1 V bis +10 V eingestellt.
Die genauen Angaben sind dem Kalibrierzeugnis zu entnehmen.
3.2 Thermischer Offsett
Durch den Anschluss der Speisespannung an den Aufnehmer bzw. an den Verstärker erfolgt eine Erwärmung.
Diese Temperaturänderung verursacht eine Nullpunktverschiebung, die sich nach etwa 15 Minuten stabilisiert.
Erst danach sollte die Nullpunkteinstellung vorgenommen werden.
Für die Praxis wird, wie auch bei anderen Messgeräten, empfohlen, den Aufnehmer sogar bis zu 60 Minuten oder auch mehr vor Beginn des Einsatzes an die Speisung anzuschließen, um eine optimale Stabilität zu gewährleisten.
4 Montage

Bitte beachten Sie bei den folgenden Punkten, dass viele unserer Druckaufnehmer mit SanShiftTM-Technologie ausgestattet und somit unempfindlicher gegen Anzugsdrehmomente und Seitenkräfte sind.
-
Bei der Montage des Aufnehmers ist darauf zu achten, dass er unbelastet ist. Dies bedeutet bei
- Kraftaufnehmern: ohne Krafteinwirkung von allen Richtungen
- Druckaufnehmern: ohne Druckaufbringung. Auf den Druckaufnehmer (auch in Absolutdruck-Ausführung) wirkt lediglich der Atmosphärendruck
- Beschleunigungsaufnehmern: ohne starke Beschleunigungseinwirkung (Stöße)
-
Beobachten Sie während der Montage ständig den Nullpunkt-Offset!
Eine Offsetverschiebung von über 3 % (Sensoren ohne SanShiftTM) bzw. 1 % (Sensoren mit SanShift) deutet auf eine fehlerhafte Montage hin, und kann die Genauigkeit und Sensitivität beeinflussen.
Bei einer Überschreitung die Montage sofort beenden! -
Für die Anbringung des Aufnehmers sollten ähnliche Materialien wie das Gehäusematerial verwendet werden.
Dadurch werden unterschiedliche Ausdehnungen durch Temperaturänderungen vermieden.
Dies ist wichtig für die Nullpunktstabilität (Offset) des Aufnehmers. -
Anzugsdrehmomente bei der Montage von Druck- und Kraftaufnehmern führen zu Nullpunktverschie-bungen.
Die SanShiftTM-Technologie minimiert diesen Effekt zwar deutlich, es ist jedoch trotzdem bei der a href="#Sensormontage">Montage darauf zu achten, dass die Anzugsdrehmomente innerhalb der im Datenblatt/Kalibrierzeugnis angegebenen Grenzen liegen, bzw. so gering wie möglich gehalten werden. -
Beschleunigungsaufnehmern müssen an ebenen Flächen angebracht werden.
Eine starre Verbindung verhindert unerwünschte Resonanzfrequenzen.
DMS-Inbetriebnahme-Anfang
5 Inbetriebnahme
5.1 Belastung
- Bei Druckaufnehmern darf die Membran nur mit Luft, Gasen oder Flüssigkeiten belastet werden.
Es dürfen sich keine harten Gegenstände im Medium befinden.
Stellen Sie sicher, dass der Flüssigkeitsstrom nicht plötzlich beginnt.
Dies erzeugt einen Stoß (Wasserhammer-Effekt), der zu einem Millisekunden-Impuls führt, dessen Amplitude wesentlich größer ist als die des regulären Drucks und der zur Zerstörung des Sensors führen kann. - Kraftaufnehmer müssen axial in Prüfrichtung belastet werden. Seitenkräfte
zerstören die Aufnehmer.
Es dürfen keine Drehmomente eingeleitet werden. Bei Aufnehmern in Ring- oder Scheibenform muss die Kraft an den zu beanspruchenden Oberflächen zur Krafteinleitung (in Druckrichtung) gleichmäßig verteilt werden.
Die zur Krafteinleitung bestimmten Kundenteile müssen deswegen mit der Oberfläche des Auf-nehmers plan abgestimmt werden.
5.2 Sensitivität
Die in den Katalogdatenblättern
angegebenen Sensitivitäten sind nur Richtwerte.
Die Sensitivität bzw. das maximale Ausgangssignal des Aufnehmers im vollbelasteten Zustand ist dem Kalibrierzeugnis zu entnehmen.
Ein Rauschverhalten der Speisespannung verursacht Rauschen am Ausgangssignal.
Eine instabile Speisespannung verursacht am Ausgangssignal von Sensoren ohne Spannungsregulator eine Nullpunkt- und Sensitivitätsänderung.
Die Änderungen sind linear proportional zu den Speisespannungsänderungen.
Zu empfehlen sind deswegen rauscharme und stabilisierte Speisespannungen.
Sensoren mit Spannungsregulator benötigen keine stabilisierten Speisespannungen, sie müssen jedoch rauschfrei sein!
DMS-Inbetriebnahme-Anfang
6 Shunt-Kalibrierung
In manchen Fällen, ist es sinnvoll, Sensoren mit Shunt-Widerständen zu versehen, um die Kalibrierung der Zu empfehlen sind deswegen rauscharme und stabilisierte Speisespannungen.
Sensoren nachträglich zu überprüfen.
Der Shunt-Widerstand wird parallel zu einem Arm der Wheatstoneschen Messbrücke angebracht.
Dies führt zu einer definierten Verstimmung der Brücke. Der Widerstand wird so gewählt, dass das Ausgangssignal der verstimmten Brücke ca. 80 % des Signals bei Nennlast beträgt.
Die Verbindung des Shunt-Widerstands zur Wheatstoneschen Messbrücke wird unterbrochen und kann mittels zweier Kabel, die herausgeführt werden, zur Kalibrierung kurzgeschlossen werden.

Wird ein Sensor mit Shunt-Widerstand bestellt, wird ein Kalibrierwert auf dem Kalibrierzeugnis angegeben.
Kalibrierung am Beispiel eines Kraftaufnehmers mit externem Verstärker:
Der Verstärker wird mit 15 V (monopolar) gespeist und liefert ein Ausgangssignal von 0,5 bis 7 V (bei einer monopolaren Speisung hat man einen positiven Nullpunkt-Offset, in diesem Fall 0,5 V)
Angaben aus dem Kalibrierzeugnis:
- Ausgang bei voller Belastung 6,5 V
- Kalibrierwert: 5,2 V (ca. 80 % vom Endwert)
Beispielsweise: Nullpunkt: 0,5 V
Beim Kurzschließen des Shunt-Widerstands erwartet man also eine Verstimmung von 5,2 V also ein Ausgangssignal von 5,2 + 0,5 = 5,7 V.
Ist der Sensor richtig kalibriert, müsste dieser Wert angezeigt werden.
Wird ein andere Wert angezeigt, so bedeutet es entweder
- dass die Verstärkung oder der Nullpunkt des Verstärkers nicht richtig eingestellt sind, oder
- die Impedanz des Sensors sich verändert hat.
Punkt 2 bedeutet meistens, dass der Sensor überlastet oder überhitzt worden ist.
Je nachdem wie stark, kann es durch Nachjustieren korrigiert werden.
Auf jeden Fall sollte in diesem Fall der Hersteller benachrichtigt werden.
Nachjustieren:
Um den Sensor zu justieren sollte man erst den Nullpunkt einstellen, danach die Verstärkung.
Dies sollte man mehrmals wiederholen, bis beide stimmen.
DMS-Inbetriebnahme-Anfang
Weitere mögliche Fehlerquellen, die bei der Inbetriebnahme eines Sensors zu vermeiden sind, sind in folgenden Abschnitten des Lexikons aufgeführt:
-> Fehlersuche
-> Montage
-> Masseschleifen
-> Aliasingeffekt
-> Bit-Rauschen
Doppler-Effekt
Bewegt sich der Beobachter auf die (ruhende) Quelle einer Schallwelle zu, dann nimmt der Beobachter nicht die Frequenz war, mit der die Schallwelle ausgesandt wurde, sondern eine (leicht) höhere Frequenz. Bewegt sich der Beobachter jedoch von der (ruhenden) Quelle weg, so nimmt er eine (leicht) niedrigere Frequenz war.
Dieser Effekt wird als Doppler-Effekt bezeichnet und tritt prinzipiell bei allen Arten von Wellen, also nicht nur bei Schallwellen, sondern auch bei Lichtwellen auf.
Trifft nun ein monochromatischer Lichtstrahl (z.B. Laserlicht) auf eine bewegte Oberfläche, verändert sich die Frequenz des von der Oberfläche zurückgestreuten Lichtes. Die Veränderung der Frequenz (Lichtwellenlänge) ist proportional zur Geschwindigkeit der Materialoberfläche.
-> Laserwegaufnehmer
-> Ultraschallwegaufnehmer
Dotieren
Die gezielte Verunreinigung von chemisch reinen Elementen (meistens Silizium oder Germanium) nennt man Dotieren.
Dabei werden die Verunreinigungsstoffe (Dotierstoffe oder Dotanten) ionisiert und elektrisch so stark in Richtung Substrat beschleunigt, dass sie in das Substrat eindringen (Ionenimplantation).
Die Dotanten besitzen entweder ein Außenelektron zuviel (Donatoren), oder ein Außenelektron zuwenig (Akzeptoren). Legt man ein elektrisches Feld an, so können sich diese Elektronen bzw. "Löcher", die nicht an ihren Atomkern gebunden sind, frei bewegen.
Die dabei enstehenden Halbleiter nennt man (je nach Art der Dotierung) N- oder P-Halbleiter. Aus Ihnen lassen sich Widerstände, Dioden und Transistoren herstellen.
-> IC
-> Mikromechanik
-> Beschleunigungsaufnehmer, MEMS
Drehmoment
Das Drehmoment einer Kraft bezüglich einer Drehachse ist definiert als das Produkt aus dem Betrag der Kraft und dem Abstand vom Drehpunkt zur Wirkungslinie der Kraft.
Ein reines Drehmoment ist aber erst möglich, wenn ein Kräftepaar wirkt, ansonsten ist keine reine Drehbewegung möglich.
Drehmomentaufnehmer
Drehmomentaufnehmer sind Messwertaufnehmer zur Erfassung von Drehmomenten.

DMS - Drehmomentaufnehmer
Am häufigsten werden hierzu Dehnungsmesstreifen auf die Welle appliziert und als Vollbrücke geschaltet.
Man unterscheidet zwischen:
- statische
Drehmomentaufnehmer
- dynamische
Drehmomentaufnehmer
Die Übertragung des Signals des rotierenden Sensorelements geschieht dabei entweder über Schleifringe oder berührungslos telemetrisch per Funk oder Infrarot. Die Speisung wird induktiv übertragen.
PCME - Drehmomentaufnehmer

Ein weiteres Messprinzip - mit dem Magnetostriktionsmessprinzip verwand - trägt die Bezeichnung PCME (Pulsed Current Modulation Encoding). Hierbei werden die Signale mittels SCSP-Elektronik verarbeitet
.
Druck
Druck ist definiert als Kraft pro Fläche. p=F/A
Maßeinheit: Pascal, Abk. Pa
1Pa = 1 N/m^2 = 10^-5 bar
100 Pa = 1 hPa = 1 bar
1 bar = 14,5039 PSI
-> Betriebsdruck
-> Druckausführung, absolut
-> Druckausführung, gekapselt
-> Druckausführung, relativ
-> Druckstoß
-> Istdruck
-> Liniendruck
-> Nenndruck
-> Normdruck
-> Prüfdruck
-> Solldruck
-> Steuerdruck
-> Systemdruck
-> Überdruck
-> Unterdruck
-> Umlaufdruck
-> Vakuum
-> Verdichtungsdruck
-> Zulässiger Druck
Druckaufnehmer
Ein Druckaufnehmer ist ein Sensor zur Messung von Drücken in Gase und Flüssigkeiten.
-> Sensormontage, Druckaufnehmer
Druckaufnehmer, frontbündig
Ein frontbündiger Druckaufnehmer ist ein Messwertaufnehmer, dessen messsensitive Elemente direkt auf der Rückseite der frontbündigen Membran angebracht sind.

Dadurch sind hohe Bandbreiten möglich - nicht nur bei piezoelektrischen, sondern auch bei DMS-basierenden Sensoren. Die Resonanzfrequenz hängt von der Dicke der Membran, der verwendeten sensitiven Elemente und der Viskosität des Mediums ab.
Bei Verwendung eines Schutzgitters - oder generell bei einer nicht frontbündigen, nach hinten versetzten Membran - sinkt die Bandbreite des Sensors.
Durch die frontbündige Membran werden Tot-Volumen reduziert und damit Messfehler vermieden. Für kleine Bauformen mit 1,27mm bis 4,6mm Membrandurchmesser werden Halbleiter-DMS (Link) verbaut.
Für höhere Temperaturen verwendet man größere Sensoren (>5mm Membrandurchmesser) mit Folien-DMS oder piezoelektrischen Elementen.
Druckaufnehmer, Flachform-
Für die Messung von Drücken auf Flächen bietet sich diese Sorte Aufnehmer an.

Will man Druckverteilungen auf größeren Flächen messen, setzt man mehrere solche Sensoren auf die Fläche.
Diese Sensoren werden auch in der Hydrodynamik eingesetzt, beispielsweise um Kavitationfraß am Laufrad von Francis-Turbinen zu minimieren.
Durch eine geeignete Montage dieser Drucksensoren, ist eine Dichtigkeit von IP 68 möglich.
Druckaufnehmer, piezoelektrische
Ein piezoelektrischer Druckaufnehmer ist ein Messwertaufnehmer, der zur Messung von quasistatischen und dynamischen Drücken geeignet ist. Das Sensormaterial ist aus Quarz, Keramik oder Tourmaline.
Druckaufnehmer, piezoresistive
Ein piezoresistiver Druckaufnehmer ist ein Messwertaufnehmer auf DMS-Basis. Er ist zur Messung von statischen (0 Hz) und dynamischen Drücken geeignet.
Druckaufnehmer, mit zurückgezogener Membran
Im Gegensatz zu frontbündigen Druckaufnehmern befindet sich bei dieser Bauform ein Verbindungsrohr zwischen Membran und Montagebohrung. Dieses wird als Druckkanal bezeichnet. Das hierdurch entstehende Tot-Volumen kann zu Messfehlern führen. Druckaufnehmer mit zurückgezogener Membran sind in der Dynamik eingeschränkt, da durch den Druckkanal ein akustisches System entsteht. Sie sind jedoch preiswerter und unempfindlicher as frontbündige Druckaufnehmer.
Druckkanal
Als Druckkanal wird bei Druckaufnehmern mit zurückgezogener Membran das Verbindungsrohr zwischen Membran und Montagebohrung bezeichnet. Dadurch entsteht ein Tot-Volumen, das Messfehler verursachen kann.
Druckmessgerät
Ein Druckmessgerät ist ein Aufbau zur Messung des Drucks. Es besteht (mindestens) aus Sensor (ggf. mit Signalaufbereitung) und Anzeige.
Druckport
Ein Druckport ist die Öffnung an einem Druckaufnehmer mit zurückgezogener Membran, die dazu dient, ihn mit dem zu messendem Druck zu verbinden.
Druckstoß
(auch Wasserhammer, Wasserschlag, Stromstoß oder Joukowski-Stoß genannt)
Wenn die Änderung der Strömungsgeschwindigkeit (dw) einer Flüssigkeit in einer Zeit (dt) stattfindet, die unterhalb eines Grenzwertes (treflex), der Reflexionszeit, liegt, spricht man von einem Druckstoß.
Nach Joukowski gilt für die Druckänderung:dp = pF * aF * dw, wobei
dp = Druckänderung
pF = Dichte des Fluids
aF = Schallgeschwindigkeit im Fluid
dw = Geschwindigkeitsänderung
Ein Druckstoß kann in Systemen auftreten,
-
die vollständig mit einem Fluid gefüllt sind.
Hierbei geht die Strömung von einer stationären in eine instationäre Strömung über. -
in denen eine Flüßigkeit vor einer Störstelle (z.B. einem Ventil) mit "hohem" Druck
anliegt und nach der Störstelle Vakuum herrscht
oder Gas mit niedrigem Druck anliegt.
Hier findet ein Phasenwechsel an der Störstelle statt.
Bei der Auswahl des Messbereiches eines Druckaufnehmers ist daher nicht nur der Systemdruck maßgebend. Viel mehr müssen auch evtl. auftretende Druckstöße berücksichtigt werden.
Dünnschichttechnik
Die Dünnschichttechnik ist wie die Dickschichttechnik ein Verfahren zur Herstellung kleiner passiver Bauelemente (wie z.B. DMS).
Die benötigten Materialien werden zunächst auf ein Trägermaterial aufgedampft und anschließend mit Elektronenstrahlen in die benötigten Formen geschnitten. Die Dünnschichttechnik ist die übliche Methode, Sensorelemente für Druck-, Kraft- und Beschleunigungsaufnehmer herzustellen.
Durchbiegung
Die Durchbiegung ist die Längenänderung (dL) eines Körpers auf Grund von Krafteinwirkung.
-> Steifigkeit
-> Dehnung
DVRT
DVRT, (auch Halbbrücken-LVDT oder LVIT) steht für Differential Variable Reluctance Tranducers
Dye
Aus einem Wafer können hunderte gleichartiger IC's bzw. mikromechanischer Bauelemente gefertigt werden. Jedes einzelne dieser Bauelemente nennt man dye.

Eichen
Ist ein Messgerät im öffentlichen Interesse besonders schützenswert (z.B. Waagen), dann ist eine staatliche Kontrolle notwendig und man spricht vom Eichen und nicht vom Kalibrieren. Die Dauer der Gültigkeit der Eichung wird auf einer Eichplakette gekennzeichnet und muss regelmäßig wiederholt werden.
-> Kalibrieren
Eigenfrequenz, f
Die Eigenfrequenz ist die Resonanzfrequenz einer mechanischen Struktur. Bei Kraftaufnehmern ist es die Resonanzfrequenz im unmontierten Zustand.
Eigenmasse, M
Die Eigenmasse ist die Masse eines nicht montierten Kraftaufnehmers, die sich bei einer Krafteinleitung bewegt. Für S-Profil Kraftaufnehmer ist die Eigenmasse in etwa die halbe Masse des gesamten Kraftaufnehmers.
Einschwingzeit
Ändert sich eine Messgröße sprunghaft, so folgt die elektrische Ausgangsgröße des Sensors nicht direkt, sondern schwingt unter Umständen eine bestimmte Zeit um den endgültigen Wert. Als Einschwingzeit wird die Zeitspanne bezeichnet, die vergeht, bis das Ausgangssignal in bestimmten Grenzen (z.B. ±10%) mit seinem endgültigen Wert übereinstimmt.
-> Anstiegszeit
elastischer Bereich
Unter dem Einfluss einer Kraft erfährt ein Körper eine Dehnung, die im elastischen Bereich der Kraft proportional ist.
-> Hookesches Gesetz
Elastizitätsgrenze (Re)
Das Ende des elastischen Bereichs wird als die Elastizitätsgrenze bezeichnet. Vor dieser Grenze bildet sich eine Verformung vollständig zurück, wenn keine äußere Kraft mehr wirkt.
-> Proportionalitätsgrenze
-> Dehngrenze
-> Streckgrenze
-> Hookesches Gesetz
Elastizitätsmodul
Der E-Modul ist das Verhältnis von Spannung und Dehnung im elastischen Bereich der Spannungs-Dehnungs-Kurve. Graphisch gesehen stellt der E-Modul damit die Steigung der Kurve (Gerade) im elastischen Bereich, also vor der Dehngrenze, dar. Der E-Modul ist ein Maß für die "Steifigkeit" des Werkstoffes. Die Verformungen sind in diesem Bereich elastisch.
-> Hookesches Gesetz
elektrischer Widerstands Standard
Der weltweite Standard für den elektrischen Widerstand ist die aus dem Quanten-Hall-Effekt resultiernde von-Klitzing-Konstante.
Da sie allerdings nicht mit der dafür notwendigen Genauigkeit bekannt ist, wurde der Wert festgelegt auf:
RK-90 = 25812,807 Ohm
Elektrostriktion
Elektrostriktion beschreibt die Deformation eines dielektrischen Mediums in Abhängigkeit eines angelegten elektrischen Felds.
Die Deformation ist proportional zum Quadrat des Feldes im Unterscheid zur piezoelektrischen Effekt bei der sie linear ist. Die Deformation ist auch unabhängig von der Richtung des angelegten Feldes.
-> Piezoelektrischer Effekt, inverser
Empfindlichkeit
-> Empfindlichkeit, normierte
-> Empfindlichkeit, volumetrische
-> Kennlinie
-> Sensitivität
-> Übertragungsfaktor
Encoder
Encoder werden in Weg- und Rotationsaufnehmern eingesetzt und geben dabei digital-kodierte Werte aus, je nach Position und Verfahrweg. Beispielsweise wird auf einer Messstrecke ein Schwarz-Weiss-Muster angebracht, das beim Verfahren optisch gescannt wird. Die Weginformationen werden dabei als Zählimpusle ausgegeben. Die Anzahl der Impulse ist proportional zur zurückgelegten Strecke. Die Anzahl der Impulse pro Messbereich definiert das Auflösungsvermögen des Encoders.
Encoder, absolut
Absolut-Encoder geben Informationen über ihre jeweilige, absolute Messposition kodiert aus.
Jedem Schritt ist ein eindeutiges, typspezifisches Codemuster zugeordnet. Da jedem Muster eine eindeutige Position zugeordnet ist, ist kein Referenzlauf nötig. Wird beispielsweise der Encoder im ausgeschalteten Zustand mechanisch verfahren, ist nach Wiedereinschalten der Spannungsversorgung die aktuelle Position ablesbar.
Encoder, Inkremental
Inkremental-Encoder geben Informationen über die relative Messposition, jeweils von einem Bezugspunkt ausgehend, als Zählimpulse aus.
Beim Einschalten der Spannungsversorgung wird die aktuelle Position als Nullstellung definiert, die absolute Position ist damit nicht ablesbar. Es ist also ein Referenzlauf notwendig, um die aktuelle absolute Position bzw. Nulllage festzulegen.
Encoder, Richtungserkennung, Vierflankenauswertung
Um die Richtung eines Rotationssensors mit Inkrementalencoder-Ausgang zu bestimmen, werden die Impulse des Encoders mittels ausgewertet. Mit der Vierflankenauswertung ist eine vierfache Auflösung erreichbar:

Entladezeitkonstante (DTC)
Die Entladezeitkonstante (DTC = Discharge Time Constant) oder Zeitkonstante (TC = Time Constant) ist die Zeit, die ein Signal benötigt, um auf 37% (1/e) seiner ursprünglichen Spannung abzufallen, wenn das Signal durch eine Stufenfunktion (Anstiegszeit gegen null) angeregt wird (im unteren Bild durch den Schalter):
v = V0 · e(-t/TC) (Gleichung 1:)


Nach t=TC ist das Signal e-1 = 1/e, also ca. 37% kleiner.
Die Entladezeitkonstante TC ist für das Verhalten eines piezoelektrischen Sensors bei niedrigen Frequenzen wichtig:
Für die untere Grenzfrequenz Fc eines piezoelektrischen Sensors gilt:
Fc ist invers proportional zur TC.
Je niedriger der Frequenzbereich ist, den man untersuchen will (quasistatische Anwendungen), desto größer muss die Entladezeitkonstante (TC) sein.
Ist die Entladezeitkonstante TC bekannt, kann die Grenzfrequenz Fc einfach errechnet werden:
Fc = 1/(2·Pi·TC) = ca. 0,16/TC
Dies ist die Frequenz, bei der die Dämpfung -3dB beträgt.
Bei -0,5dB (5%) gilt:
F0,5dB = 0,48/TC (= ca. 3 x Fc)
In der Frequenzdomäne gilt für die Dämpfung als Funktion des Grenzfrequenzvielfachen n*Fc:
Bode-Diagramm
______________________________
n*Fc | dB | Faktor | Phase
------------------------------
0,1Fc | -20,0 | 0,1 | -84,3 0,5Fc | -6,9 | 0,45 | -63,3 1Fc | -3,0 | 0,707 | -45,0 2Fc | -1,0 | 0,89 | -26,4 3Fc | -0,5 | 0,95 | -18,3 4Fc | -0,3 | 0,97 | -14,0 5Fc | -0,2 | 0,98 | -11,3 10Fc | -0,04| 0,99 | -5,7
Quasi-Statisches Verhalten:
Beispiel: Ein piezoelektrischer Kraftaufnehmer mit eine hypothetischen Zeitkonstante von 1000s wird einer konstanten Kraft F ausgesetzt.
Bei t=0 ist die Ausgangsspannung V0
Nach 10s ist die Ausgangsspannung 99% von V0

Jetzt (also nach 10s) wird die Kraft abrupt entfernt (Stufenfunktion).
Die Ausgangsspannung fällt sofort 1% unter die Nulllinie und nähert sich danach der Nulllinie exponentiell an, entsprechend Gleichung 1.
Die obere Grenzfrequenz des Frequenzgangs wird durch die Resonanzfrequenz bestimmt.
Erdbeschleunigung
Die Erdbeschleunigung, bzw. Erdschwerebeschleunigung ist die Beschleunigung, die Körper durch das Erdschwerefeld erfahren.
Die Erdbeschleunigung ist keine Konstante und variiert von Ort zu Ort, abhängig von der Höhe, dem Breitengrad und der Dichte der Erde darunter.
Erdbeschleunigung in Abhängigkeit von der Höhe
Erdbeschleunigung in Abhängigkeit vom Breitengrad
Die Abhängigkeit vom Breitengrad (θ) kann näherungsweise beschrieben werden durch:
g(θ) = 9,78031846·(0,0053024·sin2(θ)-0,0000058·sin2(2θ)
Standarderdbeschleunigung
Damit aber mit einem eindeutigen Wert gerechnet werden kann, unabhängig vom Ort, wurde ein internationaler Standardwert für die Erdbeschleunigung festgelegt, und zwar der Mittelwert der Erdbeschleunigung bei einem Breitengrad von 45°:
g0= 9,80665 m/s2
Das Gewicht eines Körpers ist die Kraft, die die Erde auf ihn ausübt und ist laut Newton/Euler gegeben durch:
Gewicht = m·g , wobei g die Erdbeschleunigung an der Stelle ist.
Die Einheit für Gewicht ist kgf, oder Newton, aber nicht kg! kg ist die Einheit für Masse!
Die Einheit kgf (kilogram force) ist definiert für eine Masse von 1kg und die Standarderdbeschleunigung 9,80665 m/s2:
1kgf=9,80665N
Tatsächlich ist aber die Kraft die auf 1kg Masse ausgeübt wird, fast nie 9,80665N, da g NICHT überall 9,80665 m/s2 ist.
Um diese Verwirrung zu vermeiden, wird die Messung und Kalibrierung von Kraft in Masseneinheiten nicht empfohlen.
Kraftaufnehmer sollten daher in Newton kalibriert werden - auch für Gewichtsmessungen.
erdfrei
Als erdfrei werden Messwertaufnehmer bezeichnet, deren Signalmasse nicht mit Erde verbunden ist. Auf diese Art und Weise lassen sich Masseschleifen vermeiden.
-> Isolierungswiderstand bei Aufnehmern
Erwartungswert
Der Erwartungswert ist der wahrscheinlichste Wert eines Ensembles von Funktionen. In erster Ordnung entspricht er dem arithmetischem Mittelwert. Der Erwartungswert E(x) einer Funktion g(x) ist definiert als E(x)= Integral g(x)·p(x) dx, wobei p(x) die Verteilungsdichte ist.
Faradayscher Käfig
Ein Faradayscher Käfig ist eine geschlossene Hülle aus leitfähigem Metall und kann für die Abschirmung von elektrischen und magnetischen Feldern eingesetzt werden, oder generell um elektronische Geräte vor äußeren elektromagnetischen Felder zu schützen - beispielsweise bei Blitzen im Flugzeug.
Die Hülle kann auch ein Drahtgeflecht sein, eine vollständige Bedeckung ist nicht notwendig, solange die 'Löcher' im Drahtgeflecht deutlich kleiner sind als die Wellenlänge der Strahlung.
Der Innenraum eines Faradayschen Käfigs wird nicht von elektrischen Felder beeinflusst. Magnetfelder werden auch abgeschirmt, aber nicht, wenn die Felder sich nur sehr langsam verändern (z.B: Erdmagnetfeld).
Die Wirkungsweise basiert auf Wirbelströmen, die sich in der Hülle bilden und dem äußeren elektromagnetischen Feld entgegen wirken.
Michael Faraday hat dies 1836 entdeckt
Faradaysches Induktionsgesetz
Die Induktionsspannung ist proportional zur zeitlichen Änderung des Induktionsflusses (Produkt aus Feldstärke und durchflossener Fläche).
-> LVDT, Linear Variable Differential Transformer
-> LVIT, Linear Variable Inductance Transducer
-> Magnetostriktive Wegaufnehmer
-> Wirbelstromwegaufnehmer
-> Induktionsprinzip
Fehler
In erster Näherung kann die Kennlinie eines Sensors durch eine Geradengleichung beschrieben werden (BSL,BSLTZ).
In der Praxis weicht die reale Kennlinie eines Sensors jedoch von dieser idealen Kennlinie ab.
Die Ursachen dafür können sein:
-> Nichtlinearität
-> Hysterese
-> Wiederholbarkeit
-> thermisches Verhalten
-> thermische Nullpunktverschiebung
-> thermische Sensitivitätsänderung
Diese Fehler können durch Kalibrierung und Signalaufbereitung minimiert werden.
Fehler werden abhängig vom Fehlertyp im Kalibrierdatenblatt entweder
- in Prozent vom Messbereich (% v.B.) bzw. vom Endwert (% v.E.)
oder
- in Prozent vom Messwert (% v.M.)
angegeben.
Dabei ist zu beachten, dass die Fehler mit der Angabe "vom Messwert" für Messungen im unteren Messbereich naturgemäß deutlich kleiner sind.
Der maximal zu erwartende Fehler kann durch die Wurzel der Summe der Quadrate der einzelnen Fehler ermittelt werden.
In der Praxis ist der tatsächliche Gesamtfehler meistens kleiner, da er von der Anwendung abhängt. Beispielsweise wie schnell sich die Last oder die Temperatur ändern, bzw. ob tatsächlich der gesamte mögliche Mess- und Temperaturbereich genutzt werden.
Mögliche Fehlerquellen, die nicht vom Sensor selber stammen:
-> Montage
-> Masseschleifen
-> Aliasingeffekt
-> Bit-Rauschen
Siehe auch:
-> Leitfaden zu Anschluß und Montage von DMS-Aufnehmern
Fehlersuche
Arbeitet ein Sensor nicht zuverlässig bzw. fehlerhaft, so sollte zunächst die mögliche Fehlerquelle so genau wie möglich lokalisiert werden. Dies kann inbesondere dann hilfreich sein, wenn dem Sensor noch Geräte zur Signalverarbeitung nachgeschaltet sind.
Als erstes sollte der Sensor vom Rest der Messkette getrennt und alleine überprüft werden.
Der Sensor sollte mit einfachsten Mittel wie Multimeter, Analogoszilloskop sowie Netzteil überprüft werden (längere Messketten und komplexe Auswertesysteme wie SPS, sind hierfür ungeeignet, da diese selbst wegen der vielen Einstellmöglichkeiten fehleranfällig sind). Stellt sich heraus, dass der Sensor funktionstüchtig ist, liegt der Fehler im Rest der Messkette.
Beispiel: Fehlersuche, DMS-Sensoren (ohne integrierten Verstärker)
Bei scheinbar fehlerhaften Messwerten sollten vor einer detaillierten Fehlersuche folgende mögliche Fehlerquellen ggf. nochmals überprüft werden:
- Allgemein bei allen Sensoren:
- Wurden alle Hinweise im Leitfaden zu Anschluß und Montage von DMS-Aufnehmern bei der Inbetriebnahme des Sensors berücksichtigt?
- Werden alle im Datenblatt spezifizierten Parameter beim Betrieb des Sensors eingehalten?
- Liegt der scheinbar fehlerhafte Messwert (unter Berücksichtigung des evtl. vorhandenen Offsets) innerhalb der zulässigen Fehlergrenzen des Sensors?
- Bei Kraftaufnehmern:
- Ist zentrische Krafteinleitung gewährleistet?
- Ist das Auftreten von Querkräften ausgeschlossen?
- Bei Druckaufnehmern:
- Wurde das zulässige Anzugsdrehmoment (-> SanShiftTM) eingehalten?
- Liegen evtl. auftretende Druckstöße innerhalb des Messbereichs (bzw. mindestens innerhalb des Bereiches der Überlastbarkeit ohne Zerstörung)?
-> Fehlersuche, DMS-Sensoren (mit integriertem Verstärker)
-> Fehlersuche, DMS-Sensoren (ohne integrierten Verstärker)
-> Fehlersuche, potentiometrische Sensoren
Fehlersuche, DMS-Sensoren (ohne integrierten Verstärker)
Die Fehlersuche bei Sensoren, die auf Dehnungsmessstreifen (DMS) basieren, kann im Wesentlichen anhand folgender Stichpunkte durchgeführt werden.
Zuvor sollte jedoch sichergestellt sein, dass die unter "Fehlersuche" beschriebenen allgemeinen Ursachen für ein scheinbares Fehlverhalten des Sensors überprüft wurden.
allg. Funktionstest eines DMS-Sensors:
- Sensor komplett von der Elektronik (z.Bsp. externen Messverstärker) trennen
- Widerstand der einzelnen Dehnungsmessstreifen (DMS) messen
(durch Widerstandsmessung zwischen je zwei der vier Ausgangslitzen,
vgl. Schaltbild der wheatstoneschen Messbrücke) - Alle Ausgangskabel miteinander verbinden und Widerstand zwischen diesen und Sensorgehäuse messen
- Sensor mit konstanter Speisespannung
(z.Bsp. Batterie oder Labornetzteil) versorgen
- Ausgangssignal des Sensors (ohne Belastung) mit Multimeter (oder
mit Analogoszilloskop) messen
(Diese Messung muss unbedingt ohne zwischengeschaltete Elektronik,
also direkt am Ausgang des Sensors, durchgeführt werden!) - Wenn möglich, Messung mit Sensor im belasteten Zustand wiederholen
- Falls Shunt-Widerstand vorhanden, Signal des unbelasteten Sensors mit Shuntwiderstand messen
Fehlersuche, DMS-Sensoren (mit integriertem Verstärker)
Die Fehlersuche bei Sensoren, die auf Dehnungsmessstreifen (DMS) basieren und einen integrierten Verstärker besitzen, kann im Wesentlichen anhand folgender Stichpunkte durchgeführt werden.
Zuvor sollte jedoch sichergestellt sein, dass die unter "Fehlersuche" beschriebenen allgemeinen Ursachen für ein scheinbares Fehlverhalten des Sensors überprüft wurden.
allg. Funktionstest eines DMS-Sensors mit integriertem Verstärker:
- Sensor mit konstanter Speisespannung
(z.Bsp. Batterie oder Labornetzteil) versorgen
(Dabei ist unbedingt zu beachten, ob es sich um einen monoplaren oder bipolaren Verstärker handelt, da sich daraus deutliche Unterschiede beim Anschluss ergeben.
Das jeweilige Anschlussschema ist unter monopolare Speisung bzw. bipolare Speisung dargestellt.) - Ausgangssignal des Sensors (ohne Belastung) mit Multimeter (oder
mit Analogoszilloskop) messen
(Diese Messung muss unbedingt ohne zusätzliche zwischengeschaltete Elektronik,
also direkt am Ausgang des Sensors, durchgeführt werden!) - Wenn möglich, Messung mit Sensor im belasteten Zustand wiederholen
allg. Funktionstest eines externen Messverstärkers:
- Messverstärker mit Spannung versorgen
(Dabei ist unbedingt zu beachten, ob es sich um einen monoplaren oder bipolaren Verstärker handelt, da sich daraus deutliche Unterschiede beim Anschluss ergeben.
Das jeweilige Anschlussschema ist unter monopolare Speisung bzw. bipolare Speisung dargestellt.) - Spannung, die der Messverstärker dem Sensor zur Verfügung stellt, mit Analogoszilloskop
(notfalls auch mit Digitaloszilloskop oder Multimeter) messen - 4 gleiche (±1%) Widerstände als Wheatstonesche Messbrücke betreiben oder DMS-Simulator verwenden und das so erzeugte mV-Signal auf den Messverstärker-Eingang geben
- Verstärker-Ausgangssignal messen (und wenn möglich mit mV-Signal vergleichen)
mögl. Ursachen für Rauschen im Sensor-Ausgangssignal:
- Ist das Rauschen "echt" oder liegt Bit-Rauschen vor?
- Sensoranschlusskabel abgeschirmt?
- Masseschleife?
(Sensorgehäuse über Abschirmung mit Gehäusen der übrigen Signalverarbeitung verbunden?) - Bei Sensoren ohne integrierten Verstärker:
Evtl. Rauschen der Versorgungsspannung kann Ausgangssignal beeinflussen
-> Sensor-Versorgungsspannung mit Oszilloskop prüfen
mögl. Ursachen für Driften des Sensorsignals und "falsche" Messwerte:
- Beeinflusst langes Messkabel das Ausgangssignal bzw. die Versorgungsspannung?
- Offset des unbelasteten Sensors (wenn möglich direkt am Sensor, z.Bsp. ohne externen Verstärker) messen
- Offset außerhalb der Spezifikationen?
- Offset konstant oder zeitlich veränderlich bei gleichen Umgebungsbedingungen?
- Wurde der Sensor überlastet? (Kann durch Überprüfung beim Hersteller festgestellt werden)
- Können Effekte durch Änderung der Umgebungstemperatur erklärt werden?
- Temperaturänderung mögl. durch:
- Volumenänderung (bei Drucksensoren, wegen allg. Gasgesetz)
- Anfassen
- Anhauchen
- Effekte durch Änderung der Umgebungstemperatur außerhalb der Spezifikationen?
-> Betriebstemperatur
-> kompensierter Temperaturbereich
-> Temperaturkompensierung
-> thermische Nullpunktverschiebung
-> thermische Sensitivitätsänderung - Sensor gemäß Datenblatt montiert?
- richtiges Anzugsdrehmoment (Drucksensoren)
- korrekte Krafteinleitung (Kraftsensoren), evtl. Querkräfte und Drehmomente beachten
- "Leitfaden zu Anschluß und Montage von DMS-Aufnehmern"
- Wird ein evtl. vorhandener Messverstärker (integriert oder extern) korrekt mit Spannung versorgt?
- monopolarer Verstärker:
- benötigte Anschlüsse der Spannungsquelle: "0V" und "+" (typ. +12V)
- Die Leitungen für Speisung und Signal dürfen an keiner Stelle verbunden sein!
-> monopolare Speisung - bipolarer Verstärker:
- benötigte Anschlüsse der Spannungsquelle: "-" (typ. -15V) , "0V" , "+" (typ. +15V)
Der "0V" Ausgang wird dabei explizit benötigt und muss mit dem dafür vorgesehenen Eingang des Messverstärkers verbunden werden. - Die Leitung für "- Signal" muss mit "0V" der Spannungsversorgung verbunden sein!
-> bipolare Speisung - Die maximale Ausgangsspannung eines Messverstärkers kann maximal 70% der Versorgungsspannung betragen. Prinzipiell empfiehlt es sich daher, den Messverstärker mit genau der angegebenen Versorgungsspannung zu betreiben.
Fehlersuche, piezoelektrische Sensoren
Beispiel: Verfälschtes Signal: Werden piezoelektrische-IEPE Sensoren einer höheren Beschleunigung ausgesetzt, als der dynamische Messbereich zulässt, oder wenn der Sensor im Bereich der Eigenfrequenz angeregt wird, so wird eine für den eingesetzen Verstärker (JFET oder MOSFET) zu hohe Ladung erzeugt.
Der Verstärker geht dann in Sättigung.
Ein typischer Signalverlauf in einem solchen Fall wird hier dargestellt:

Bei Anwendungen wie Motorklopfen oder Ventilschläge treten sehr kurze aber hohe Pulse auf (Dirac-Stöße). Diese Stöße erzeugen eine bis in sehr hohe Frequenzen verteilte Anregung.
Somit werden auch auch die Sensoren, die diese Stöße messen sollen, im hohen Frequenzbereich angeregt.
Auch wenn piezoelektrische Sensoren üblicherweise hohe Eigenfrequenzen besitzen, werden sie damit auch im Resonanzbereich angeregt.
Dies kann also zur Zerstörung des Sensors oder zumindest zur Verfälschung des Signals (Sättigung) führen.
Wird die Sättigung durch das Anregen im Bereich der Eigenfrequenz verursacht, so kann dies elektronisch durch den den Einbau eines Tiefpass-Filters vor dem JFET- bzw. MOSFET-Verstärkers, bzw. mechanisch durch den Einsatz mechanischer Dämpfungselemente korrigiert werden.
Fehlersuche, potentiometrische Sensoren
Die Fehlersuche bei Weg-Sensoren ohne integrierte Elektronik, die auf Potentiometern basieren, kann bei mechanisch intakten Sensoren im Wesentlichen anhand folgender Stichpunkte durchgeführt werden.
Zuvor sollte jedoch sichergestellt sein, dass die unter "Fehlersuche" beschriebenen allgemeinen Ursachen für ein scheinbares Fehlverhalten des Sensors überprüft wurden.
allg. Funktionstest:
- Sensor komplett von der Elektronik (z.Bsp. Messwerterfassungskarte) trennen
- Gesamt-Widerstand des Spannungsteilers mit Multimeter messen
(bei Potentiometern zwischen "CW und CCW") - Sensor mit konstanter Speisespannung (z.Bsp. Batterie) versorgen
- Sensor-Ausgangssignal mit Multimeter messen (ohne Weg)
(bei Potentiometern zwischen "S und CW bzw. CCW") - Sensor-Ausgangssignal mit Multimeter messen (bei max. mögl. Messweg)
(bei Potentiometern zwischen "S und CW bzw. CCW")
mögl. Ursachen für Rauschen im Sensor-Ausgangssignal:
- Ist das Rauschen "echt" oder liegt Bit-Rauschen vor?
- Sensoranschlusskabel abgeschirmt?
- Masseschleife?
(Sensorgehäuse über Abschirmung mit Gehäusen der übrigen Signalverarbeitung verbunden?) - Evtl. Rauschen der Versorgungsspannung kann Ausgangssignal beeinflussen
-> Sensor-Versorgungsspannung mit Analogoszilloskop prüfen
Feldeffekttransistoren sind unipolare Transistoren, bei denen nur ein Ladungstyp am Stromtransport beteiligt ist.
-> JFET
-> MOSFET
Feuchte, relative
Die relative Feuchte gibt an, wieviel Feuchtigkeit ein Gas bereits aufgenommen hat. Die Angabe erfolgt in Prozent, wobei 100% bedeutet, dass das Gas die (bei dieser Temperatur) maximal mögliche Menge an Feuchtigkeit aufgenommen hat. Berechnet wird die relative Feuchte als Verhältnis zwischem den vorhandenem Partialdampfdruck und dem Sättigungsdampfdruck. Zu beachten ist dabei, dass der Sättigungsdampfdruck (und damit auch die relative Feuchte) von der Temperatur des Gases abhängt.
PSI = Pd/Pds ; t = konst
FFT (Fast-Fourier Transformation)
Bei der FFT nimmt man an, dass komplexe Signalformen sich in einfache Sinus- und Kosinusfunktionen mit verschiedenen Amplituden und Frequenzen zerlegen lassen (Fourierreihen).
Mit der FFT eines solchen komplexen Signals werden die Frequenz-, Amplituden- und Phasenanteile berechnet.
Man transformiert also Funktionen vom Zeitbereich x(t) ins Frequenzbereich X(f). Dies nennt man Frequenzanalyse
Die Darstellung der Frequenzen und deren Amplituden im Frequenzbereich, die in solchen Signalformen enthalten sind, nennt man Frequenzspektrum.


Frequenzanalyse an rotierenden Systemen nennt man Ordnungsanalyse.
Hier wird das Frequenzspektrum in ein ganzzahliges Vielfaches der aktuellen Drehzahl umgerechnet und man erhält das Ordnungsspektrum.
Die erste Ordnung entspricht dann der aktuellen Drehzahl, die zweite Ordnung dem zweifachen der aktuellen Drehzahl etc.

-> Fourierreihen
-> Autokorrelationsfunktion
-> Autoleistungsdichte (Autoleistungsspektrum)
-> Erwartungswert
-> Kohärenzfunktion
-> Kreuzkorrelationsfunktion
-> Kreuzleistungsdichte (Autoleistungsspektrum)
-> Übertragungsfunktion
-> Verteilungsdichte
-> Verteilungsfunktion
-> FFT, invers
FFT-Fensterfunktion
Eine FFT liefert nur 'saubere' Ergebnisse wenn das Signal keine Sprünge hat, die Amplituden am Anfang und Ende des betrachteten Zietbereichs gliech sind und die Länge des Zeitbereichs genau 2n samples lang ist oder wenn das Signal transient ist und innerhalb des betrachteten Zeitbereichs liegt.
Da dies meistens nicht der Fall ist, wird das signal mit einem 'Fenster' punktweise multipliziert.

Da transiente Signale per Definition abklingen, benötigen sie kein Fenster (=> Rechteckfenster), denn die Anfangs- und Endwerte sind gleich (=0). Die einzige Bedingung ist, dass das zu analysierende Zeitabschnitt (bzw n, wobei Zeitabschnitt =2n Samples) so groß gewählt wird, dass das gesamte Signal innerhalb des Fensters liegt.

Es gibt mehrere Typen von Fenster. Einige sind:
Rechteck =kein Fenster
Hanning
Hamming
Blackman-Harris
FFT-Wasserfalldarstellung
Wird ein Zeitsignal betrachtet, der sehr lang ist und sich mit der Zeit verändert (Fledermaussignal), dann ist es sinnvoll dieses Signal in mehrere Teilbereiche zu unterteilen, und die Ergebisse der FFT jeweils nacheinander darzustellen.

FFT-Farbspektrogramm
Das Farbspektrogramm ist eine andere Darstellungsform der Wasserfalldarstellung. Dies ist ein Draufsicht des Wasserfalldiagramms, wobei die Amplituden mit verschiednen Farben dargestellt werden.
FFT, invers
Die invers-FFT ist die Umkehrung vom FFT wobei Funktionen vom Frequenzbereich X(f) ins Zeitbereich x(t) transformiert werden.
FFT-Analysator
Ein FFT-Analysator ist ein Gerät zur Bestimmung der in einem Signal enthaltenen Frequenzanteile. Dabei wird das Signal zunächst digitalisiert und anschließend mit Hilfe der Fast-Fourier-Transformation (FFT) ausgewertet.
Filter
Filter haben in der Messtechnik zwei grundsätzliche Aufgaben:
- Unterdrückung bestimmter Frequenzanteile eines Signals. So lässt sich z.B. Rauschen reduziern.
- Begrenzung des Frequenzspektrums eines Signals.
Wichtig z.B. bei der Digitalisierung analoger Signale.
-> Aliasingeffekt
-> Filter, digitale
-> Filter, digitale, FIR
-> Filter, digitale, IIR
Filter, analoge
Analoge Filter dienen dazu, ein Signal zu filtern. Es gibt prinzipiell zwei Möglichkeiten, analoge Filter zu realisieren.
- passive analoge Filter:
Sie bestehen aus einer geeigneten Schaltung von Spulen, Kondensatoren und ggf. Widerständen (RCL-Glied).
Allerdings sind niedrige Grenzfrequenzen nur schwierig zu realisieren und die Güte (Flankensteilheit) liegt typischerweise bei 6dB/Oktave. - aktive analoge Filter:
Sie bestehen aus einem Operationsverstärker, der geeignet mit Spulen, Kondensatoren und Widerständen beschaltet ist.
Mit dieser Schaltung lassen sich nahezu beliebige Grenzfrequenzen, auch mit einer Güte (Flankensteilheit) größer als 6dB/Oktave, realisieren.
Filter, Bandpass
Ein Bandpassfilter benutzt man, um ein bestimmtes Frequenzband mit einer Bandbreite B = f2 - f1 durchzulassen und die übrigen Frequenzbereiche zu sperren. Hierbei ist f1 die untere Grenzfrequenz und f2 die obere. Die Band-Mittenfrequenz wird als f0 bezeichnet.
Filter, Bandsperre
Ein Bandsperrfilter benutzt man, um ein bestimmtes Frequenzband mit einer Bandbreite B = f2 - f1 zu sperren und die übrigen Frequenzbereiche durchzulassen. Hierbei ist f1 die untere Grenzfrequenz und f2 die obere. Die Band-Mittenfrequenz wird als f0 bezeichnet.
Filter, digitale
Digitale Filter basieren prinzipiell auf mathematischen Verfahren, die auf ein Signal angewendet werden. Zur digitalen Filterung muss das analoge Signal also zunächst digitalisiert (und ggf. voher analog gefiltert (-> Aliasingeffekt)) werden. Der große Vorteil digitaler Filter gegenüber analogen Filtern ist, dass man während der Aufnahme die gesamte Bandbreite an Signalen und somit auch die unerwünschten Signale dokumentiert. Dadurch kann man, wie bei analogen Filtern, nicht nur die unerwünschten Signale herausfiltern, sondern diese unerwünschten Signale auch untersuchen, beispielsweise um zu sehen, wie die Wirkung dieser Signale ist. Bei analogen Filtern sind diese Signale nicht mehr existent.
Es gibt zwei Arten digitaler Filter: Filter, digitale, FIR
FIR steht für "Finite Impulse Response"
und beschreibt die Tatsache, dass dieser Filtertyp eine endliche Impulsantwort besitzt. Gibt man also einen Impuls auf den Eingang eines solchen FIR Filters, so klingt das Ausgangssignal innerhalb endlicher Zeit wieder auf Null ab.
FIR Filter erzeugen weniger Fehler und haben ein sehr gutes Phasenverhalten.
Da sich die Phase linear mit der Frequenz ändert (ausgenommen die Faltungen bei +/- 180°) ist die Verzögerung bei allen Frequenzen gleich.
FIR Filter haben keine Rückkopplungskomponenten und können deshalb nicht zu Schwingen anfangen, im Gegensatz zu analogen und IIR Filtern.
Ein weiterer Vorteil von FIR Filtern ist die konstante Gruppenlaufzeit.
FIR Filter sind jedoch etwas kömplizierter in der Anwendung. Sie müssen erst erstellt werden und erst dann angewandt werden. Wenn die Ergebnisse nicht gut genug sind, müssen sie erneut erstellt werden. Dieses iterative Verfahren ist sehr umständlich.
Filter, digitale, IIR
IIR steht für "Infinite Impulse Response"
und beschreibt die Tatsache, dass dieser Filtertyp theoretisch keine endliche Impulsantwort besitzt. Gibt man also einen Impuls auf den Eingang eines solchen IIR Filters, so klingt das Ausgangssignal exponentiell ab und erreicht den Wert Null nur in unendlicher Zeit.
IIR Filter sind wesentlich einfacher in der Handhabung. Sie benötigen weniger Rechenleistung, um einen vergleichbaren Filtereffekt zu erzeugen. Daher werden sie, trotz unterlegener technicher Eingenschaften, meistens gegenüber FIR Filtern bervorzugt.
Filter, Hochpass
Ein Hochpassfilter benutzt man, um alle Frequenzen oberhalb einer Grenzfrequenz durchzulassen.
Filter, Tiefpass
Ein Tiefpassfilter benutzt man, um alle Frequenzen unterhalb einer Grenzfrequenz durchzulassen.
Flüssigkeitseingenschaft-Sensoren

Flachprofil - Kraftaufnehmer
Flachprofil-Aufnehmer zeichnen sich gegenüber Säulenaufnehmern durch ihre geringere Bauhöhe aus. Im Prinzip bestehen sie aus zwei konzentrischen Ringen, die mit Streben verbunden sind. Bei äußerer Krafteinleitung werden die Ringe axial gegeneinander verschoben, was zu einer Verbiegung der Streben führt. Durch Messung dieser Verbiegung und geeigneter Auswertung lässt sich so ein zur Krafteinwirkung proportionales Signal gewinnen. Ein Vorteil dieser Bauform ist die geringere Empfindlichkeit gegenüber nichtaxial eingeleiteten Kräften.
-> Querkraftempfindlichkeit
Folien-DMS
Die leitende Schicht eines Folien-DMS besteht aus einer ca. 5 µm dicken Konstantanlegierung. Ihr elektrischer Widerstand weist eine geringe Temperaturabhängigkeit auf , daher sind sie für Temperaturen bis 220 °C geeignet. Folien-DMS sind größer als Halbleiter-DMS und haben typischerweise eine Impdanz von 350 oder 700 OHM, sowie eine Sensitivität von < 3 mV/V.
Die Widerstandsänderung der Folien-DMS basiert im Wesentlichen auf der Änderung der Geometrie des Materials (Widerstand, elektrischer) und kaum auf dem piezoresistiven Effekt.
Fourierreihen
Fourierreihen beschreiben periodische Funktionen x(t)=x(t+n·T) mit der Gleichung:
x(t)= Summe ancos(w0t)+Summe bnsin(w0t), wobei
an und bn die Fourierkoeffizienten sind,
w0 die Kreisfrequenz der Grundschwingung,
n·w0 die diskreten Frequenzen sind, mit n= 1,2,3... usw.
Ein klassiches beispiel ist ein Rechtecksignal:
u = us1·sin(wt)+us3·sin(3wt)+ us5·sin(5wt).
us1=1, us3=1/3, us5=1/5
Man erkennt, dass komplexe Signalformen, wie hier Rechtecke, sich in einfachen Sinus- und Cosinussignalen mit verschiedenen Frequenzen und Amplituden zerlegen lassen.
Diese Frequenzen der einzelnen Sinus- und Cosinussignalen, deren Amplituden und deren Phasenbeziehung zueinander können mittels der FFT berechnet werden.
-> FFT, invers
Frequenzen, Musiknoten
Hier ist eine Zuordnung von Musiknoten bzw. Klaviertasten zu Frequenzen:

Frequenzgang
Innerhalb des im Datenblatt angegebenen Frequenzbereiches liegt die Empfindlichkeit eines Messwertaufnehmers innnerhalb der spezifierten Grenzen bzw. Toleranzen (z.B.±5% oder ± 3dB).
-> Bandbreite
-> Resonanzfrequenz
frequenzoptimiert
Ändert sich der mit einem piezoelektrischen Druckaufnehmer zu messende Druck sprunghaft, so kommt es zu einem Resonanzeffekt. Die sogenannten "frequenzoptimierten" Druckaufnehmer sind dahingehend optimiert, dieses Verhalten weniger stark zu zeigen.
gedämpfte Schwingung
Wenn die freie Schwingung von einer Reibungskraft gebremst wird, spricht man von einer gedämpften Schwingung.
Gekapselte Druckausführung
Die gekapselte Druckausführung ist eine Bauart von Druckaufnehmern. Mit solchen Druckaufnehmern lässt sich der Druck bezogen auf den zur Zeit der Herstellung des Druckaufnehmers herrschenden Druck messen.
-> Druck
-> Relativdruck
-> Absolutdruck
Genauigkeit
-> Gesamtgenauigkeit
Geräteklassen
Die Klasse eines elektrischen Messgerätes gibt an, mit welchem maximalen Fehler beim Einsatz dieses Gerätes zu rechnen ist. Der Fehler wird in Prozent des Meßbereichs-Endwertes angegeben.
-> Genauigkeitsklassen
-> Kalibrierung bei 50% vom Nennbereich
Genauigkeitsklassen elektrischer Messgeräte nach VDE 0410
Die Genauigkeitsklasse gibt den maximal zulässigen absoluten Fehler in Prozent vom Messbereichsendwert an.
- Feinmessgeräte
Klasse Anzeigefehler Einflussfehler
0,1 ±0,1% ±0,1%
0,2 ±0,2% ±0,2%
0,5 ±0,5% ±0,5%
1,0 ±1,0% ±1,0% - Betriebsmessgeräte
Klasse Anzeigefehler Einflussfehler
1,5 ±1,5% ±1,5%
2,5 ±2,5% ±2,5%
5,0 ±5,0% ±5,0%
Die Gesamtgenauigkeit gibt unter Berücksichtigung aller möglichen Fehlerquellen den maximalen Messfehler an. Eine Abschätzung dafür kann als Wurzel aus der Summe der Quadrate der jeweiligen Messfehlern berechnet werden.
Im Sensorbereich sind diese Fehler:
die Nichtlinearität
die Hysterese und
die Wiederholbarkeit.
Gewinde
Es gibt ein Vielzahl von Gewindetypen. Die Gewinde für die Montage von Sensoren beschränken sich hauptsächlich auf Spitzgewinde.
Zylindrische Gewinde sind parallel verlaufende Gewinde und sind nicht dichtend.

Kegelige Gewinde sind Gewinde-Bolzen bei denen der Verlauf der Außengewinde konisch ist.

Da das Innengewinde des Gegenstücks zylindrisch ist, dichtet es beim Verschrauben des Bolzens.
Metrische Gewinde
Metrische Gewinde sind Gewinde, die auf der Längenheit Meter basieren.
 | ||||||||||
| Metrisches ISO Gewinde, Flankenwinkel 60° (Auszug) | ||||||||||
| Kennung | Außen Ø mm d=D | Steigung mm p | Flanken Ø mm d2=D2 | Kern Ø Bolzen d3 | Kern Ø Mutter D1 | Gew.tiefe Bolzen h3 | Gew.tiefe Mutter H1 | Rundung mm r | Gewinde- bohrer Ø mm | |
| M2.5 | 2.50 | 0.45 | 2.208 | 1.948 | 2.013 | 0.276 | 0.244 | 0.065 | 2.05 | |
| M3 | 3.00 | 0.50 | 2.675 | 2.387 | 2.459 | 0.307 | 0.271 | 0.072 | 2.50 | |
| M4 | 4.00 | 0.70 | 3.545 | 3.141 | 3.242 | 0.429 | 0.379 | 0.101 | 3.30 | |
| M5 | 5.00 | 0.80 | 4.480 | 4.019 | 4.134 | 0.491 | 0.433 | 0.115 | 4.20 | |
| M6 | 6.00 | 1.00 | 5.350 | 4.773 | 4.917 | 0.613 | 0.541 | 0.144 | 5.00 | |
| M8 | 8.00 | 1.25 | 7.188 | 6.466 | 6.647 | 0.767 | 0.677 | 0.180 | 6.80 | |
| M10 | 10.00 | 1.50 | 9.026 | 8.160 | 8.376 | 0.920 | 0.812 | 0.217 | 8.50 | |
| M12 | 12.00 | 1.75 | 10.863 | 9.853 | 10.106 | 1.074 | 0.947 | 0.253 | 10.20 | |
| M16 | 16.00 | 2.00 | 14.701 | 13.546 | 13.835 | 1.227 | 1.083 | 0.289 | 14.00 | |
| M20 | 20.00 | 2.50 | 18.376 | 16.933 | 17.294 | 1.534 | 1.353 | 0.361 | 17.50 | |
| M24 | 24.00 | 3.00 | 22.051 | 20.319 | 20.752 | 1.840 | 1.624 | 0.433 | 21.00 | |
| M36 | 36.00 | 4.00 | 33.402 | 31.093 | 31.670 | 2.454 | 2.165 | 0.577 | 32.00 | |
| M45 | 45.00 | 4.50 | 42.077 | 39.479 | 40.129 | 2.760 | 2.436 | 0.650 | 40.50 | |
| M56 | 56.00 | 5.50 | 52.428 | 49.252 | 50.046 | 3.374 | 2.977 | 0.794 | 50.50 | |
| M64 | 64.00 | 6.00 | 60.103 | 56.639 | 57.505 | 3.681 | 3.248 | 0.866 | 58.00 | |
| Metrisches Feingewinde, Flankenwinkel 60° (Auszug) | ||||||||||
| Kennung | Außen Ø mm d=D | Steigung mm p | Flanken Ø mm d2=D2 | Kern Ø Bolzen d3 | Kern Ø Mutter D1 | Gew.tiefe Bolzen h3 | Gew.tiefe Mutter H1 | Rundung mm r | Gewinde- bohrer Ø mm | |
| M2.5x0.35 | 2.50 | 0.35 | 2.273 | 2.071 | 2.121 | 0.215 | 0.189 | 0.051 | 2.10 | |
| M3x0.35 | 3.00 | 0.35 | 2.773 | 2.571 | 2.621 | 0.215 | 0.189 | 0.051 | 2.60 | |
| M4x0.5 | 4.00 | 0.50 | 3.675 | 3.387 | 3.459 | 0.307 | 0.271 | 0.072 | 3.50 | |
| M5x0.5 | 5.00 | 0.50 | 4.675 | 4.387 | 4.459 | 0.307 | 0.271 | 0.072 | 4.50 | |
| M6x0.75 | 6.00 | 0.75 | 5.513 | 5.080 | 5.188 | 0.460 | 0.406 | 0.108 | 5.20 | |
| M8x0.75 | 8.00 | 0.75 | 7.513 | 7.080 | 7.188 | 0.460 | 0.406 | 0.108 | 7.20 | |
| M10x1 | 10.00 | 1.00 | 9.350 | 8.773 | 8.917 | 0.613 | 0.541 | 0.144 | 9.00 | |
| M16x1 | 16.00 | 1.00 | 15.350 | 14.773 | 14.917 | 0.613 | 0.541 | 0.144 | 15.00 | |
| M16x1,5 | 16.00 | 1.50 | 15.026 | 14.160 | 14.376 | 0.920 | 0.812 | 0.217 | 14.50 | |
| M20x1,5 | 20.00 | 1.50 | 19.026 | 18.160 | 18.376 | 0.920 | 0.812 | 0.217 | 18.50 | |
| M24x2 | 24.00 | 2.00 | 22.701 | 21.546 | 21.835 | 1.227 | 1.083 | 0.289 | 22.00 | |
| M32x2 | 32.00 | 2.00 | 30.701 | 29.546 | 29.835 | 1.227 | 1.083 | 0.289 | 30.00 | |
| M36x3 | 36.00 | 3.00 | 34.051 | 32.319 | 32.752 | 1.840 | 1.624 | 0.433 | 33.00 | |
| M45x4 | 45.00 | 4.00 | 42.402 | 40.093 | 40.670 | 2.454 | 2.165 | 0.577 | 41.00 | |
| M56x2 | 56.00 | 2.00 | 54.701 | 43.546 | 53.835 | 1.227 | 1.083 | 0.289 | 54.00 | |
| M64x4 | 64.00 | 4.00 | 61.402 | 59.093 | 59.670 | 2.454 | 2.165 | 0.577 | 60.00 | |
| M80x3 | 80.00 | 3.00 | 78.051 | 76.319 | 76.752 | 1.840 | 1.624 | 0.433 | 77.00 | |
Zoll-Gewinde
Zöllige Gewinde sind Gewinde, die auf der Längenheit Zoll (bzw. Inch) basieren.
Die häufigsten Zoll-Gewinde sind:
Withworth Rohrgewinde, nicht dichtend
| |||||||||
| zylindrisches Rohrgewinde (British Standard Pipe Parallel), Flankenwinkel 55° | |||||||||
| Kennung | Außen Ø mm d=D | Steigung mm p | Flanken Ø mm d2=D2 | Kern Ø Bolzen d3 | Kern Ø Mutter D1 | Gänge tpi | Gewinde- bohrer Ø mm | ||
| G 1/8, BSPP 1/8" | 9.728 | 0.907 | 9.147 | 8.566 | 0.581 | 28 | 8.7 | ||
| G 1/4, BSPP 1/4" | 13.157 | 1.337 | 12.301 | 11.445 | 0.856 | 19 | 11.6 | ||
| G 1/2, BSPP 1/2" | 20.955 | 1.814 | 19.793 | 18.631 | 1.162 | 14 | 19 | ||
| G 3/4, BSPP 3/4" | 26.441 | 1.814 | 25.279 | 24.117 | 1.162 | 14 | 24.5 | ||
Withworth Rohrgewinde, dichtend
Die Kennung für das Außengewinde ist 'R', in England 'BSPT' (British Standard Pipe Tapered). Der Gewindeverlauf ist kegelig (1:16). Der Flankenwinkel beträgt 55°
Die Kennung für das Innengewinde ist 'Rp'. Der Gewindeverlauf ist zylindrisch.
Die M, G und R Gewinde sind in ISO- oder DIN-Normen spezifiziert.
Hierzu kommen noch die Amerikanischen Gewinde, die auch sehr oft in Drucktransmittern eingesetzt werden:
Amerikanisches kegeliges Rohrgewinde, NPT (National Pipe Taper)
| |||||||||
| Amerikanisches kegeliges(1:16) Rohrgewinde, Flankenwinkel 60° | |||||||||
| Kennung | Außen Ø mm d=D | Steigung mm p | Gänge tpi | Bohrung mm | |||||
| NPT 1/8" | 10,3 | 0,94 | 27 | 10,6 - 0,2 | |||||
| NPT 1/4" | 13,7 | 1,41 | 18 | 14,0 - 0,2 | |||||
| NPT 3/8" | 17,1 | 1,41 | 18 | 17,4 - 0,2 | |||||
| NPT 1/2" | 21,3 | 1,81 | 14 | 21,6 - 0,2 | |||||
| NPT 3/4" | 26,7 | 1,81 | 14 | 27,0 - 0,2 | |||||
Weiterhin gibt es auch das
Amerikanisches Grobgewinde UNC (Unified Coarse Thread) und
Amerikanisches Feingewinde UNF (Unified Fine Thread).
Gleichdruckeffekt
Bei Differenzdruckaufnehmern kann, auch wenn der Differenzdruck gleich Null ist, ein unerwünschtes Ausgangssignal auftreten, falls sich der Systemdruck erhöht. Beim Messen von Differenzdruck sollte also ein gleiches Druckpotential an den Eingängen möglichst vermieden werden.
Grenzfrequenz
Unter der Grenzfrequenz fc (cutoff frequency) eines Filters versteht man diejenige Frequenz, bei der die Amplitude um 3dB abgeschwächt ist.
-> Entladezeitkonstante (DTC)
Gyroskop, MEMS
In einem Drehraten-Gyroskop befindet sich eine seismische Masse m, die in einem Rahmen A gefedert aufgehängt ist, und zum Schwingen angeregt wird. Der Rahmen A ist wiederum so aufgehängt, dass er senkrecht zur Schwingrichtung der Masse schwingen kann.

Befindet sich das Gyroskop auf einem Objekt, das sich dreht, dann verursacht die Schwingung der Masse m eine dazu senkrechte Schwingung des Rahmens A aufgrund der Corioliskraft.

Eine Änderung der Position des Rahmens A relativ zu den Kondensatorplatten verursacht eine Änderung der Kapazitäten der beiden Kondensatoren (C1 und C2).
Die Kapazitätsänderung ist proportional zur Drehrate.
Gyroskopischer Effekt
Ein Kreisel, der sich schnell dreht, behält aufgrund seiner Massenträgheit bzw. der Drehimpulserhaltung seine Orientierung im Raum.

Einen Kreisel, der mit 3 Freiheitsgraden aufgehängt wird nennt man ein Kreiselinstrument oder Gyroskop.
Die einfachste Form einer solchen Aufhängung ist ein Pendel.

Versucht man die Drehachse zu kippen, resultiert ein Drehmoment um den Gesamtimpuls zu erhalten. Die Kreiselachse kippt senkrecht zur angreifenden Kraft und der Kreisel präzediert entlang eines Kegels (wie beim Spielzeugkreisel).

Ein Kreiselkompass oder Gyrokompass ist ein Gyroskop, das für die Navigation benutzt wird.

Kreiselkompasse haben eine kardanische Aufhängung, in der der Kreisel unabhängig von Lage oder Bewegung frei drehbar ist. Die cardanische Aufhängung wurde nach Gerolamo Cardano (1501 - 1576) benannt.
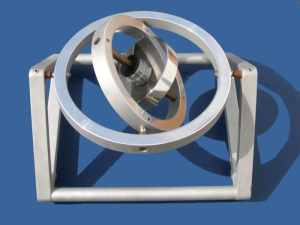
Die Navigation mit einem Gyrokompass ist sehr viel einfacher, präziser und sicherer als mit einem Magnetkompass - so lange er störungsfrei funktioniert. Der Magnetkompass muss daher zur Kontrolle mit verwendet werden.
Die Nutzung des gyroskopischen Effekts ist einer der wenigen Methoden, mit der eine Neigung unabhängig von der Erdbeschleunigung gemessen werden kann. Bei Neigungssensoren, die auf die Bewegung einer seismischen Masse beruhen (Pendel), kann Neigung von langsamen Beschleunigungen physikalish nicht unterschieden werden.
-> Beschleunigung-Winkel-Beziehung
Halbleiter-DMS
Halbleiter-DMS werden aus Silizium oder Germanium (von manchen Herstellern mikromechanisch) gefertigt. Entgegen eines weitverbreiteten Vorurteils arbeiten sie sehr linear und genau. Sie sind sehr klein (ab 0,7 mm Länge!) und eignen sich insbesondere für Miniatur-Sensoren, die nicht genug Raum für Metall-Folien-DMS bieten. Ein weiterer Vorteil ist die hohe Sensitivität von bis zu 20 mV/V.
Halbleiter-DMS sind für Temperaturen bis 150 °C geeignet. Halbleiter-DMS-Brücken haben eine Impdanz von 1 kOHM bis 15 kOHM.
Die Widerstandsänderung der Halbleiter-DMS basiert im Wesentlichen auf dem piezoresistiven Effekt und kaum auf der Änderung der Geometrie des Materials (Widerstand, elektrischer).
HBT, Half Bridge Transducer
-> LVIT
Hall-Effekt,
Auf Ladungsträger, die sich in einem Leiter bewegen, der sich in einem Magnetfeld befindet, wirkt die Lorentz-Kraft, die eine Ablenkung der Ladungsträger verursacht.
Bewegen sich die Ladungsträger senkrecht zum Magnetfeld, so werden sie senkrecht zu Stromfluss und Magnetfeld gelenkt.

Durch die Ansammlung der Ladungsträger auf einer Seite des Leiters baut sich, ähnlich wie in einem Kondensator, eine Spannung auf. Dadurch entsteht wiederum ein elektrisches Feld, das eine der Lorentz-Kraft entgegenwirkende Kraft zur Folge hat. So ist die Ansammlung der Ladungsträger auf das Maß begrenzt, bei dem sich beide Kräfte im Gleichgewicht befinden. Die aus dem Hall-Effekt resultierende Spannung nennt man Hall-Spannung.
Für sie gilt: UH = RH*I*B/d, wobei RH=1/n*e die Hall Konstante ist.
(n: Ladungsträgerdichte des Materials, d: Dicke des Materials in Richtung senkrecht zum Stromfluss)
Materialien mit niedriger Ladungsträgerdichte (z.Bsp. Halbleiter wie InAs, InAsP und InSb) erzeugen also bei gleichem Magnetfeld höhere Hall-Spannungen und werden daher bevorzugt für Hall-Sensoren eingesetzt.
-> Quanten-Hall-Effekt
-> Hall-Sensor
Hall-Sensor
Hall Sensoren werden eingesetzt, um die Stärke magnetischer Felder zu messen. Das Funktionsprinzip dieses Sensors beruht auf dem Hall-Effekt.
HALT-HASS Lebensdauer- und Belastungsprüfung (Umweltsimulation)
HALT-HASS sind Lebensdauer- und Belastungsprüfmethoden, um Schwachstellen von Prüflingen schon bei der Entwicklung zu erkennen und zu beseitigen sowie um fehleranfällige Produkte während der Produktion auszusortieren.
Meistens ist die Ausfallhäufigkeit bei der Einführung neuer Produkte hoch, mit der Zeit sinkt sie auf ein festes Niveau, in der sie bleibt, bis Alterserscheinungen sie wieder steigen läßt.
Dies ergibt die sogenannte 'Badewannen-Kurve':

HALT (Highly Accelerated Life Testing)
HALT ist eine stark beschleunigte Lebensdauerprüfung während der Entwicklung von Produkten.
HALT wird in der Produktentwicklungsphase eingesetzt um Designfehler - im Gegensatz zu Fertigungsfehler - zu finden.
Designfehler sind beispielsweise ungeeignete, zu dünnes oder zu dickes Material, bzw. falsche Bauformen, schlechter Aerodynamik, schlechte Federung, zu grobe Toleranzen etc. Solche Fehler können dazu führen, dass das Produkt im Betrieb zu stark vibriert, an Schwachstellen leicht bricht, bei hohen Temperaturen geschwächt wird, Flüssigkeitsleitungen im Produkt undicht werden, etc.
Um diese Mängel zu erkennen, wird das Produkt Belastungen durch Temperatur und Vibration ausgesetzt, die stufenweise so lange erhöht werden, bis es ausfällt. Die so getesteten Produkte können nicht mehr verwendet werden. HALT ist also sehr kostenintensiv. Design-bedingte Ausfälle, die normalerweise erst nach mehreren Jahren erkennbar werden, werden in kürzester Zeit erzwungen. Durch Korrekturen an diesen Schwachstellen im Design des Produktes kann die Lebensdauer vor der Markteinführung verlängert werden. Rückholaktionen von Produktserien wegen Fehlern im Design, die erst nach der Markteinführung festgestellt würden, können vermieden werden. Hierdurch relativiert sich die Kostenintensität wieder.
Der untere Teil der 'Badewannen-Kurve' wird niedriger und der mittlere Teil länger, so dass altersbedingte Verschleißerscheinungen deutlich später auftreten.
Die Ergebnisse des HALT-Prozesses dienen als Grundlage für den HASS-Test. Bei HASS wird angenommen, dass HALT-Prüfungen bei der Entwicklung des Produktes schon durchgeführt worden sind:
HASS (Highly Accelerated Stress Screen)
HASS ist eine stark beschleunigte Belastungsauslese von Produkten während der Produktion.
HASS wird in der Produktionsendkontrolle eingesetzt, um mangelhafte Produkte auszusortieren und Fertigungsfehler - im Gegensatz zu Designfehler - zu finden.
Fertigungsfehler sind beispielsweise, kalte Lötstellen, schlechte Schweißnahten und andere Verbindungen, loose Schrauben, Luftblasen bei Verklebungsprozesse, usw...
Da die Produkte nicht beschädigt werden dürfen, sind die Belastungen bei HASS deutlich niediger als bei HALT.
Mit HASS wird versucht, die Frühphase des Produktes im Betrieb in sehr kurzer Zeit durchlaufen zu lassen. Diese künstliche Alterung provoziert herstellungsbedingte Schwachstellen bei fehlerhaften Produkten, die sonst nur nach dem Einsatz im Betrieb festzustellen wären. Gute Produkte werden durch HASS (im Gegensatz zu HALT-Prüfungen) nicht gefährdet. Fehlerhafte Produkte können so in der Produktionsendkontrolle herausgefiltert werden.
HALTund HASS weden auch unter dem Begriff ESS (Environmental Stress Screening), also umgebungsbedingte Belastungsauslese, zusammengefasst.
Hammerkit
Als Hammerkit werden Geräte zur Impulsanregung mechanischer Strukturen bezeichnet.
-> Impulshammer
-> Beschleunigungsaufnehmer
harmonische Schwingung
Unter dem Begriff "harmonische Schwingung" versteht man Bewegungen, die einer Sinus- oder Kosinus-Funktion folgen.
x(t)= Xsin(wt + phi)
wobei w=2·PI·f = die Kreisfrequenz ist
und phi der Phasenwinkel
harmonische Schwingung, komplex
Komplex harmonische Schwingungen sind periodische Schwinungen, die sich in harmonische Schwingungen zerlegen lassen.
Ein klassiches beispiel ist ein Rechtecksignal:
u = us1·sin(wt)+us3·sin(3wt)+ us5·sin(5wt).
Eine solche Gleichung nennt man Fourierreihe.
Himmelskugel, Himmelssphäre

Hookescher Bereich
-> elastischer Bereich
Hookesches Gesetz für elastische Verformung (Spannungs-Dehnungs-Kurve)
Die mechanische Spannung (S=F/A) ist proportional zur Dehnung (d) unterhalb der Proportionalitätsgrenze.
Der Proportionalitätsfaktor ist der Elastizitätsmodul E.
S = E · d

-> Dehnung
-> elastischer Bereich
-> Elastizitätsmodul
-> Elastizitätsgrenze
-> Proportionalitätsgrenze
-> Streckgrenze
-> technische Elastizitätsgrenze
-> k-Wert
-> Zugfestigkeit
Hopkinson-Stab (Hopkinson Bar)
Ein Hopkinson-Stab wird eingesetzt um Stoße auf Prüflinge zu übertragen, zum Beispiel für die Kalibrierung von Beschleunigungsaufnehmern oder um Materialeigenschaften eines Prüflings zu ermitteln.
Das Prinzip beruht auf der Ausbreitung von Wellen in einem Stab. Durch ein Stoßimpuls wird eine Welle an einem Ende des Hopkinson-Stabs angeregt.
Am anderen Ende des Hopkinson-Stabs erzeugt die Welle, bedingt durch die Reflektion der Welle, eine Bewegung des Stabs. Hier wird der Prüfling 'Huckepack' auf einem Back-to-Back-Kalibriersensor angebracht

Die Dehnung entlang des Stabs, die durch die Wellenausbreitung verursacht wird, wird mittels DMS-Brücken für die Berechnung der mechanischen Spannung, Dehnung und Dehnungsgeschwindigkeit erfasst.
Abhängig vom Anwendungsbereich kann der Stoß mechanisch durch Luftdruck oder ein Pendel, oder hydrodynamisch bzw. piezoelektrisch (wie beim Schwingerreger) erzeugt werden. Die Stoß-Pulsform wird durch das Material des "Ambosses", auf dem das Projektil (Stoß-Stab) trifft, geformt. Keramik verursacht eine kurze, Filz eine lange Pulsform.

Der Vorteil eines piezoelektrischen Stoßerregers liegt darin, dass die Pulsform elektrisch im Aktor geformt wird und direkt auf den Hopkinson-Stab übertragen wird.
Hopkinsonstab, geteilt (Split Hopkinson Bar)

Der geteilte Hopkinsonstab wird benutzt um die Materialeigenschaften eines Prüflings zu ermitteln.
Er besteht aus zwei Stäben, dem Eintrittsstab (incedent bar) und dem Übertragsstab (transmitted bar).
Der Prüfling wird zwischen den beiden befestigt.
Der Stoß wird mittels eines Stoß-Stabs (striker bar) übertragen. Die Wellenlänge des Pulses ist ca. doppelt so hoch wie die Länge des Stoß-Stabs. Also muss der Einfallsstab mindestens doppelt so lang sein wir der Stoß-Stab.
Die DMS müssen mindestens so weit wie die Länge des Stoß-Stabs vom Anfang des Hopkinson-Stabs entfernt sein, um eine Überlagerung der einfallenden und reflektierten Wellen zu verhindern.
Erreicht die Stoßwelle, auch Einfallswelle genannt (Incedent Wave) den Prüfling, spaltet sie sich in ein reflektierte Welle und die Übertragungswelle (Transmission Wave).
Die Übertragungswelle breitet sich durch den Prüfling in den Übertragsstab aus und verursacht eine Deformation des Prüflings. Die reflektierte Welle breitet sich vom Prüfling aus weg durch den Eintrittsstab.
Eine Analyse der DMS-Signale ermöglicht Aussagen über den Prüfling.
HUMS- Health and Usage Monitoring Systems
HUMS - in Deutsch Strukturzustands- und -nutzungsüberwachungsysteme - wird insbesondere im Bereich Luft- und Raumfahrt eingesetzt.
Um die katastrophalen Folgen von Strukturschäden am Fluggerät zu vermeiden, wird im Betrieb die Schadenserkennung und -überwachung von Strukturbauteilen mit eine kontinuierliche Überwachung und Erfassung von Betriebslasten mittels geeigneter Sensoren durchgeführt.
Hybrid-Elektronik
Hybrid Schaltkreise bestehen aus einem (Al2O3 - ) Träger (Substrat) der mit weiteren Schichten versehen wird:
- Widerstandsschicht (meistens CrNi)
- Sperrschicht
- Leiterbahnschicht (meistens Gold)
Bei der Dickschichttechnologie werden diese Schichten mit Siebdruck hergestellt, bei der Dünnschichttechnologie werden diese Schichten aufgedampft oder mittels plasmagestützter Prozesse (Sputter-Verfahren) aufgebracht.
Leiterbahnen erhält man durch das Wegätzen aller Schichten. Widerstände erhält man durch das Wegätzen nur der Leiterbahnschicht.
Kapazitäten und Induktivitäten können über die Geometrie der Leiterbahnen erzeugt werden.
Aktive Bauelemente werden darauf ohne Gehäuse (Dye) oder mit Gehäuse (SMD) aufgebracht.
Diese werden dann durch Bonddrähte mit den Leiterbahnen verbunden.
Die Dickschichttechnologie ist billiger, die Dünnschichttechnologie ist dagegen zuverlässiger, präziser und wesentlich kompakter.
Hybrid-Verstärker
Hybrid-Verstärker sind Subminiaturverstärker, die auf Hybrid-Technik basieren. Durch ihre geringe Größe können sie auch in Miniatur-Sensoren integriert werden.
-> Mikroelektronik
Hysterese
Der Verlauf der Kennlinie eines Sensors bei zunehmender und abnehmender Last ist nicht identisch und bildet eine 'S'-förmige Fläche.

Die Abweichung dieser beiden Ausgangssignale bei 50% Last nennt man Hysterese.
Die Hysterese kann durch aufwendige Kalibrierung und Elektronik minimiert werden, wenn die Kennlinie bekannt ist.
-> Fehler
-> Gesamtgenauigkeit
-> Nichtlinearität
-> Kalibrierung bei 50% vom Nennbereich
-> Wiederholbarkeit
-> Hysterese
-> thermisches Verhalten
-> thermische Nullpunktverschiebung
-> thermische Sensitivitätsänderung
IC
Abkürzung für: Integrated Circuit
Ein integrierter Schaltkreis besteht aus mehreren elektronischen Bauelementen, die mit einer sehr hohen Dichte auf einem Trägermaterial (Substrat) zusammengefasst sind. Auf dem Subtrat werden mehrere Schichten dotierter Halbleiter und Isolationsschichten angebracht.
Herstellung: Durch das Aufbringen von Fotolack, mehrfaches Belichten, Entwickeln, anschließendes Abwaschen der nicht belichteten Stellen und das Wegätzen des ungeschützten Materials werden die Strukturen der Schaltungen auf Wafer erzeugt.
-> Hybrid-Elektronik
IEPE
IEPE steht für: Integrated Electronics Piezo-Electric
Piezoelektrische Sensoren ohne integrierte Verstäker liefern einen Ladungsausgang (piezoelektrischer Effekt). Bei der elektrischen Verarbeitung der Ladung kann es zu Fehlern durch Feuchte, Kabelbewegungen (Triboelektrisches Rauschen) und Änderung der Leitungslängen kommen. Um das Problem zu lösen werden Verstärker eingebaut (FET - Field Effect Transistor). Man erhält ein Signal das unabhängig von der Kabellänge und einfach zu handhaben ist. Piezoelektrische Sensoren mit eingebauter Elektronik nennt man IEPE-Sensoren. IEPE hat sich zu einem industrieweiten Standard entwickelt.
Es gibt verschiedene Bezeichnungen für diesen Standard:
Hersteller Name Beschreibung alle IEPE Integrated Electronics Piezo-Electric B&K DeltaTron® Dytran LIVM® Low Impedance Voltage Mode Endevco Isotron® Kistler Piezotron® Piezoelectric Electronics PCB ICP® Integrated Circuit PiezoelectricVorteil: Einfache Handhabung, beliebige Kabellängen
Nachteil: Temperatur eingeschränkt durch Halbleiterverstärker (maximal 150°C bis 200°C)
Funktionsweise:
Werden bestimmte Quarze mechanisch belastet wird ein Ladungsverteilung dq erzeugt:. Diese Ladung sammelt sich in der Kristall-Kapazität C1 und liefert eine Ausgangsspannung von:
dV = dq / C1.
piezoelektrische Schaltung, Ladungsausgang
Piezoelektrische Sensoren mit Ladungsausgang stellen einen hochohmigen Ladungsausgang zur Verfügung. Die einfachste mögliche Messkette mit einem solchen Sensor sieht dann so aus:
Die gesamte Sensitvität des Systems ist jedoch;
dV = dq / (C1 + C2 + C3).
Diese Abhängigkeit der Systemempfindlichkeit von der Kapazität des Systems schränkt die verwendbare Kabellänge deutlich ein.
piezoelektrische Schaltung, Ladungsverstärker
Um dies zu umgehen, kann man sogenannte "In-Line" Verstärker benutzen, also Verstärker, die zwischen Sensor und Anzeige geschaltet werden.
Hier ist das Ausgangssignal gegeben durch:
dV = dq / Cr, wobei Cr die Rückkopplungs-Kapazität ist.
Auch hier ist die Länge des Kabels zwischen Sensor und "In-Line" Verstärker eingeschränkt. Weiterhin ist das Rauschen am Ausgangssignal abhängig vom Verhältnis zwischen Cr und (C1 + C2 + C3).
piezoelektrische Schaltung, Konstantstromquelle
Die eleganteste Lösung ist die Integration der Elektronik im Sensor.
Hierzu verwendet man einen MOSFET bzw. einen JFET.
Die Quell-Impedanz beim Sensorausgang ist sehr niedrig und ermöglicht damit den Einsatz von langen Kabeln.
piezoelektrische Schaltung, Konstantspannungsquelle
Für eine Speisung mit einer Konstantspannungsquelle wird ein In-Line IEPE Modul verwendet:

Impulshammer
Ein Impulshammer ist ein Hammer, in dem ein piezoelektrischer Kraftaufnehmer integriert ist. Er wird bei der Modalanalyse eingesetzt, um beispielsweise feststellen, ob Risse im Material vorhanden sind.

Hierzu wird das System mit dem Impulshammer an mehreren Punkten angeregt und der Erregerimpuls gemessen. Mit einem zusätzlichen Beschleunigungsaufnehmer, der am gleichen Ort verbleibt, wird die Systemantwort aufgezeichnet. Aus dem Erreger- und Antwortsignal wird die Übertragungsfunktion ermittelt, aus der sich die modalen Größen ergeben.
Um möglichst viele Informationen zu sammeln ist es notwendig, dass der Erregerimpuls möglichst breitbandig ist.
Ein idealer Impulshammerschlag (unendlich kurz und hoch) ergibt eine konstante spektrale Leistungsdichte über alle Frequenzen und erzeugt somit weißes Rauschen.
Mathematisch wird ein idealer Impulshammerschlag durch die Delta-Funktion (auch Dirac-Stoß genannt) dargestellt.
Sochle Stöße kommen auch in vielen Anwendungen wie beispielsweise Motorklopfen oder Ventilschläge vor.
-> Fehlersuche, piezoelektrische Sensoren
Impulshämmer sollten so abgestimmt sein, dass Mehrfachanregungen verursacht durch das Abprallen des Hammers an der Oberfläche (Mehrfachschläge) vermieden, und somit weitgehend ausgeschlossen werden, und dass man ein lineares Frequenzband erhält.
Es gibt verschiedene Ausführungen von Impulshämmern mit verschiedenen Spitzen, die unterschiedliche Frequenzbereiche anregen und in verschiedenen Anwendungsbereichen eingesetzt werden.

In-Line Verstärker
In-Line Verstärker sind kleine Verstärker, die im Sensorkabel integriert werden können.

Sie werden eingesetzt, wenn der Sensor selbst nicht genügend Platz für einen Integrierten Verstärker bietet. Sie sind eine preiswerte Alternative zu Tischgeräten und 19" Systemen.
Induktionsprinzip
Jeder Wechselstrom erzeugt ein Wechselmagnetfeld und
jedes Wechselmagnetfeld erzeugt einen Wechselstrom.
Diese Tatsachen haben zur Folge, dass ein (durch ein Wechselmagnetfeld) induzierter Wechselstrom gleichzeitig immer auch ein Wechselmagnetfeld (Selbstinduktion) erzeugt.
-> faradaysches Induktionsgesetz
-> LVDT, Linear Variable Differential Transformer
-> LVIT, Linear Variable Inductance Transducer
-> Magnetostriktive Wegaufnehmer
-> Wirbelstromwegaufnehmer
inelastischer Bereich
Die Dehnung steigt in diesem Bereich nicht mehr linear mit der Kraft. Eine Verformung bildet sich auch dann nicht mehr vollständig zurück, wenn keine äußere Kraft mehr wirkt. Die Verformungen sind in diesem Bereich inelastisch.
-> Dehngrenze
-> Durchbiegung
-> Elastizitätsgrenze
-> Hookesches Gesetz
-> Streckgrenze
-> technische Elastizitätsgrenze
Influenz
Wird ein elektrisch leitfähiger Körper einem elektrischen Feld ausgesetzt, so kommt es in diesem Körper zu einer Verschiebung der Ladungsträger. Dadurch bildet sich in diesem Körper eine elektrische Spannung aus.
Inklinometer, Neigungssensor
Inklinometer, auch Neigungssensoren genannt, erlauben die Messung von Neigungen.
Typische Anwedungen für einachsiale Sensoren sind:
- Nivellierung
- Messen des Wankens (Bewegung um die Längsachse, Roll)
- Messen des Nickens (Bewegung um die Querachse, Pitch)
-> Schiffsbewegungen
Typische Anwedungen für biachsiale Sensoren sind:
- Plattform-Nivellierung
- Radausrichtung
- Antennen-Positionierung.
-> Neigungssensor, elektrolytischer
-> Neigungssensor, kapazitiver
-> Neigungssensor, magnetoresistiver
Inkrementale Wegaufnehmer
Inkrementale Wegaufnehmer liefern die aktuelle Position durch Zählen von Pulsen.
-> Absolute Wegaufnehmer
-> Wegaufnehmer
Interface
Ein Interface ist eine standardisierte Schnittstelle zur Datenübertragung zwischen zwei oder mehreren Geräten.
-> RS-232
-> RS-422
Integrierter Verstärker
Durch die Miniaturisierung von Schaltkreisen wie beispielsweise in der Hybrid-Elektronik ist es möglich, Verstärker auch in sehr kleine Miniatursensoren zu integrieren.

Dadurch können Fehler durch EMV-Störungen oder Sensitivitätsänderungen (z.Bsp. durch Spannungsabfälle in langen Kabeln) vermieden werden.
IP - Schutzarten elektrischer Betriebsmittel durch Gehäuse und Abdeckungen nach IEC/EN 60 529
(IP = International Protection)
- Ziffer 1 (Fremdkörperschutz)
0 kein besonderer Schutz
1 große Fremdkörper, Ø > 50 mm
2 mittelgroße Fremdkörper, Ø > 12,5 mm
3 kleine Fremdkörper, Ø > 2,5 mm
4 kornförmige Fremdkörper, Ø > 1 mm
5 Staubgeschützt, Staubablagerungen sind zulässig, dürfen aber in ihrer Menge nicht die Funktion der Geräte gefährden
6 Staubdicht - Ziffer 2 (Wasserschutz)
0 kein besonderer Schutz
1 gegen senkrecht fallendes Tropfwasser
2 gegen schräg fallendes Tropfwasser, bis ±15 Grad Abweichung von der Senkrechten
3 gegen Sprühwasser, Sprühwinkel bis ±60 Grad Abweichung von der Senkrechten
4 gegen Spritzwasser aus allen Richtungen
5 gegen Strahlwasser aus einer Düse aus allen Richtungen
6 gegen starkes Strahlwasser aus einer Düse aus allen Richtungen
7 gegen zeitweiliges Untertauchen in Wasser
8 gegen dauerndes Untertauchen in Wasser
9K gegen Wasser bei Hochdruck-/Dampfstrahl-Reinigung (80-100bar) (gilt nach DIN 40 050 Teil 9 nur für Straßenfahrzeuge)
Isolierungswiderstand bei Aufnehmern
Bezeichnet bei erdfreien Messwertaufnehmern den elektrischen Widerstand zwischen Gehäuse und Signalmasse.
Isolatorausführung
Dieses Design ist eine spezielle Bauform eines Beschleunigungsaufnehmers. Ändert sich die Umgebungstemperatur eines Beschleunigungsaufnehmers sprunghaft oder wird seine Basis mit einer Biegebeanspruchung belastet, so kann es dadurch zu Messfehlern kommen. Dieser Effekt wird durch diese Bauform verringert.
Istdruck
Der Istdruck bezeichnet den zu einem bestimmten Zeitpunkt an einem bestimmten Ort vorhandenen Druck.
-> Druck
-> Liniendruck
JFET
JFETs oder Junction-FETs sind einfach aufgebaute Unipolartransistoren in der Familie der Feldeffekttransistoren (FET) und werden als Ladungsverstärker in IEPE - Messwertaufnehmern verwendet.
Sie haben ein besseres Rauschverhalten als MOSFETs können jedoch nicht bei so hohen Temperaturen eingesetzt werden.
-> FET (Field Effect Transistor)
-> MOSFET
Joule
Ein Joule ist die Energie, die benötigt wird, um über die Strecke von einem Meter die Kraft von einem Newton aufzuwenden, bzw. für die Dauer einer Sekunde die Leistung von einem Watt aufzubringen.
Justierung
Unter Justierung verstehlt man das Einstellen eines Messgerätes durch aktives Eingreifen in das Gerät, um Abweichungen, die sich durch das Kalibrieren ergeben, zu minimieren.
Beim reinen Kalibrieren wird dagegen nicht aktiv in das Messgerät eingegriffen.
-> Kalibrierung
k-Wert
Der k-Wert gibt bei Dehnungsmessstreifen das Verhältnis von relativer Widerstandsänderung zu relativer Längenänderung an. So bedeutet zum Beispiel ein k-Wert von k=2, dass sich der Widerstand doppelt so stark ändert, wie die Länge.
k=(dR/R)/(dL/L)
Wobei dR/R die relative Widerstandsänderung und dL/L die relative Längenänderung ist.
Die relative Längenänderung wird häufig auch als Dehnung bezeichnet d=dL/L.
Kabel
Kabelbewegung, Fehler durch Triboelektrisches Rauschen
Kabelbruch, feststellbar im 4-20mA Stromkreis
Fehler durch lange Kabel
- Spannungsabfall -> Sense-Leitung
- IEPE statt Ladung
Kabelrauschen
- durch nicht abgeschirmte Kabel - Faradayscher Käfig
- durch Triboelektrisches Rauschen
Kabel-Verstärker (In-Line Verstärker)
Kabeltypen:
- Koax (ideal für Zwei-Leiter-Kabel wegen der Abschirmung des Innenleiters)
- verdrillt (um induktive Störungen zu minimieren)
- Abgeschirmt
Kalibriernormal, Bezugsnormal, Vergleichsnormal
Das Kalibriernormal stellt mit hoher Genauigkeit die Vergleichsgröße zur Verfügung, die zur Kalibrierung von Messwertaufnehmern oder Messgeräten im Allgemeinen benötigt wird.
Kalibrierung
Kalibrierung wird nach DIN13191 folgendermaßen definiert:
"Ermitteln des Zusammenhangs zwischen Messwert oder Erwartungswert der Ausgangsgröße und dem zugehörigen wahren oder richtigen Wert der als Eingangsgröße vorliegenden Messgröße für eine betrachtete Messeinrichtung"
Dabei können Eigenschaften wie z.B.
Sensitivität, Nichtlinearität, Hysterese, Wiederholbarkeit oder auch der Temperaturkoeffizient ermittelt werden und in einem Kalibrierschein dokumentiert werden.
Es gibt zwei Vorgehensweisen zur Kalibrierung:
- vergleichendes Kalibrierverfahren
- absolutes Kalibrierverfahren
Durch die Kalibrierung wird die Abweichung der Messwerte eines Sensors mit Referenzwerten eines genaueren Standards (Kalibriernormal/Bezugsnormal) bestimmt.
Ein Beispiel hierfür ist die Back-To-Back-Kalibrierung
absolutes Kalibrierverfahren
Hierbei wird die Messgröße durch eine andere Basisgröße (beispielsweise Beschleunigung durch eine doppelte Integration des Wegs) bestimmt.
Werks-Kalibrierung
Ist die Referenz ein vom Werk bestimmter Standard, spricht man von einer Werks-Kalibrierung.
rückführbare Kalibrierung
Ist die Referenz ein vom Nationallabor geprüfter, nationaler Standard, dann spricht man von einer auf das Nationallabor rückführbaren Kalibrierung.
Im Unterschied zur Werkskalibrierung ist hierbei die Vergleichbarkeit der Kalibrierzertifikate verschiedener Firmen vom Vorteil.
DKD-Kalibrierung
Ist das Labor von der Akkreditierungsstelle des Nationallabors (in Deutschland DKD) akkreditiert, spricht man von einer DKD-Kalibrierung.
Die Nationallabors in Europa erkennen sich gegenseitig an, so dass ein DKD-Kalibrierschein auch in anderen europäischen Ländern gültig ist und umgekehrt.
Kalibrierung, Beschleunigung, frequency sweep (Frequenzdurchlauf)
Bei einer "Frequency-Sweep"-Kalibrierung wird der Frequenzverlauf des Sensors ermittelt. Hierzu wird der Sensor auf einem Schwingerreger montiert, meistens 'huckepack' auf einem Back-To-Back-Kalibriernormal, und über einem vorgegebenen Frequenzbereich angeregt.

Kalibrierung, Beschleunigung, Zentrifugen
Die Zentrifugenkalibrierung wird benutzt um statische Beschleunigungen zu erzeugen, um die Linearität eines Beschleunigungsaufnehmers zu prüfen. Eine Drehscheibe angetrieben von einem Motor wird benutzt um die Beschleunigung zu erzeugen. Da Durchmesser und Drehgeschwindigkeit bekannt sind, kann die Beschleunigung berechnet werden um den Sensor zu kalibrieren.
Kalibrierung, Beschleunigung, Stoß
Bei der Schock-Kalibrierung wird eine transiente Anregung verwendet um Beschleunigungsaufnehmer zu kalibrieren - mit einem Hopkinson-Stab Kalibrator bis über 100.000g. Durch die transiente Anregung wird ein hohe Bandbreite abgedeckt. Solch hohe Belastungen kommen beispielsweise bei Crash-Untersuchungen vor.
Hierbei wird ein Stoßimpuls beispielsweise mittels eines Pendel-Kalibrators, Projektil-Kalibrators, Fall-Kalibrators oder Hopkinson-Stabs (Hopkinson Bar) auf dem Prüfling übertragen. Meistens wird auch hier ein Back-To-Back-Kalibriernormal zwischengeschaltet, um die Signale miteinander zu vergleichen.
Pendel-Kalibrierung
Projektil-Kalibrierung
Freier-Fall-Kalibrierung
Hopkinson-Stab-Kalibrierung
-> Eichen
-> Kalibrierung bei 50% vom Nennbereich
Kalibrierung, Drehmoment

Kalibrierung, Druck

Kalibrierung, Kraft, Dead Weight

Kalibrierung, mehrachsiale Kraft-/Drehmomentaufnehmer

Diese Vorrichtung kann auch zur Drehmomentkalibrierung verwendet werden.
Hierzu wird die Krafteinleitung um ΔL nach rechts verschoben

Kalibrierung, Weg

Kalibrierzertifikat
Das Kalibrierzertifikat (auch Kalibrierschein, Kalibrierzeugnis, oder Kalibrierdatenblatt genannt) protokolliert die während der Kalibrierung gemessenen Daten und die daraus resultierenden Eigenschaften des Sensors oder Messgerätes wie beispielsweise die Genauigkeit.
Darüberhinaus enthält es Angaben zum durchführenden Labor, die Bedingungen, unter denen die Kalibrierung durchgeführt wurde, die eingesetzten Prüfmittel, ggfls. mit der Rückführbarkeit auf das nationale Kalibriernormal, und, falls vorhanden, die Akkreditierung durch ein nationale Institution wie die Deutsche Akkreditierungstelle, DAkkS.
Die Inhalte dieser Datenblätter werden in den entsprechenden Richtlinien dokumentiert:
VDI/VDE/DKD 2637 (Wägezellen)
VDI/VDE/DKD 2638 (Kraft)
VDI/VDE/DKD 2624 (Kraft - Mobil) VDI/VDE/DKD 2639/2646 (Drehmoment)
VDI/VDE/DGQ 2618 (Druck)
DAkkS-DKD-R 3-3 (Kraft)
DAkkS-DKD-R 3-5 (Statisches Drehmoment)
DAkkS-DKD-R 6-1 (Druck)
DAkkS-DKD-R 3-1 Blatt 1-4 (Beschleunigung)
...
Die Grundbegriffe wie Genauigkeit, Kalibrierung etc. werden in der Richtline VDI/VDE/DKD 2600 Blätter 2 und 3 definiert.
Kavitation
Schnell rotierende Objekte in Wasser - wie Laufräder von Kreiselpumpen, Wasserturbinen oder Schiffspropeller - erzeugen Dampfblasen durch sich schnell verändernden Druck. Werden diese Dampfblasen höheren Drücken ausgesetzt, können sie implodieren und hohe Druckspitzen erzeugen. Diese Bildung und Auflösung von Dampfblasen in Flüssigkeiten nennt man Kavitation.
Kavitation kann erhebliche Schäden (wie in der Abbildung), Vibration und einen Verlust an Effizienz verursachen.

Die Abbildung unten zeigt eine Francis-Turbine, wie sie häufig in Wasserkraftwerken eingesetzt wird.



Die verstellbaren Leitschaufeln (gelb) regeln den Wasserstrom in Abhängigkeit vom Wasserstand im Reservoir. Kavitation entsteht hier an den Eintrittskanten der Leitschaufeln.
Flachform Druckaufnehmer werden verwendet, um die optimale Stellung der Leitschaufeln zu regeln, also die optimale Wassermenge bei geringster Zerstörung durch Kavitationseffekte.
Kennlinie
-> Sensitivität
Kohärenzfunktion
Wird eine Struktur beispeilsweise durch einen Impulshammer angeregt, geht die Übertragungsfunktion davon aus, dass die gemessene übertragene Schwingung ausschließlich eine Antwort auf den Erregerimpuls ist. Es wird also vorrausgesetzt, dass die aufgenommenen Erreger- und Antwortsignale kein Eigenrauschen haben, die Anregung ausschließlich aus dem Errgerimpuls erzeugt wird und die Übertragung linear ist.
Unter reellen Bedingungen können aber stets Fremdsignale im Antwortsignal enthalten sein.
Die Kohärenzfunktion zwischen ein Erreger- und Antworsignal wird benutzt um festzustellen, ob eine gemessene Schwingung ihre Quelle in dieser Errger hat, oder ob die Quelle eine andere ist. Die Kohärenzfunktion wird auch zur Bestimmung des Rausch/Nutzsignal Verhältnisses benutzt.

Um erkennen zu können, welche Anteile der Spektren nicht auf den Erregerimpuls zurückzuführen sind, ist es notwendig, die Messung mehrmals durchzuführen. Die hierfür notwendige Funktion nennt man Kohärenzfunktion. Sie ist definiert als der Anteil der Ausgangsleistung, der durch den Erregerimpuls verursacht wird:
Ausgangsleistung nur durch den Erregerimpuls
G = --------------------------------------------
Gesamtausgangsleistung
Sind keine Fremdanteile in den Spektren vorhanden, ist die Kohärenzfunktion 1.Sind ausschließlich Fremdeanteile vorhanden ist sie 0.

kompensierter Temperaturbereich
Dieser Temperaturbereich muss eingehalten werden, damit ein Messwertaufnehmer so arbeitet, wie im Datenblatt spezifiziert.
Zu Beachten ist, dass es innerhalb dieses Temperaturbereiches durch thermische Effekte zu einer Nullpunktverschiebung und Sensitivitätsänderung kommt.
Wird also beispielsweise die Nullpunktverschiebung im Datenblatt mit <2% v.B./50°C angegeben und der kompensierte Temperaturbereich des Sensors ist -20°C bis +80°C, so beträgt die maximale Nullpunktverschiebung in diesem Bereich (2% v.B./50°C)·100°C = 4% v.B. .
Die Fehlergrenzen berücksichtigen allerdings - insbesondere für auf Halbleiter-DMSbasierenden Sensoren - nur langsame Temperaturänderungen und keine schnellen Temperaturschocks.
-> Betriebstemperaturbereich
-> Temperaturkoeffizient
-> Temperaturkompensierung
Körperschall
Als Körperschall werden Schallwellen bezeichnet,
- die sich in einem Festkörper ausbreiten. Die so entstandene Vibration kann mit Beschleunigungsaufnehmern gemessen werden.
Kraft
Kraft ist definiert als das Produkt aus Masse und Beschleunigung.
F=m · a
Die Maßeinheit ist: Newton, N
Es gilt: 1N = 1 kg m s-2
Kraftaufnehmer

Ein Kraftaufnhemer ist ein Sensor zur Messung mechanischer Kräfte.
Kraftaufnehmer, DMS

Ein DMS-Kraftaufnehmer besteht aus einem Federkörper, der sich bei Belastung dehnt. DMS werden am Körper appliziert und zu einer Wheatstoneschen - Brücke geschaltet. In den beiden benachbarten Brückenzweigen befinden sich jeweils längs- bzw. quergeklebte DMS.
Eine Verformung des Körpers führt zu einer Änderung der Widerstände der DMS und damit zu einer Verstimmung der Brücke. Die dabei entstehende elektrische Spannungsänderung ist proportional zur Kraft.
DMS-Kraftaufnehmer eignen sich sowohl für statische als auch für dynamische Anwendungen.
Kraftaufnehmer, piezoelektrisch

Piezoelektrische Kraftaufnehmer bestehen im Wesentlichen aus einem Quarz, auf den die zu messenden Kraft wirkt. Die so erzeugte Ladung ist proportional zur angreifenden Kraft und kann mit einem Ladungsverstärker weiterverarbeitet werden.
Piezoelektrische Kraftaufnehmer sind ideal zum Messen hochdynamischer Kräfte, weniger zum Messen quasistatischer Kräfte (als DMS-Kraftaufnehmer), und nicht zum Messen statischer Kräfte geeignet.
Kreuzkorrelationsfunktion, Korrelation (Rxy)
Die Korrelation Rxy quantifiziert wie ähnlich zwei Signale x(t), und y(t) sind.
Sie wird eingesetzt um festzustellen, welche Effekte welchen Ursachen zuzuordnen sind.
Hierzu wird das Signal x zu einer bestimmten Zeit t mit y zu verschiedenen Zeiten y(t+τ) verglichen.
Hiermit wird sichergestellt, dass beispielsweise auch phasenversetzte Korrelationen erfasst werden.
Mathematisch wird das Produkt beider Signale zu jedem Zeitpunkt gebildet und bei unterschiedlichen Zeitverschiebungen y(t+τ) summiert:
Rxy(τ)=∫x(t) · y(t+τ)dt

Die Korrelation wird also in der Zeitdomäne ermittelt.
Die Korrelation kann aber auch über die inverse FFT (F-1) der Produkte der Fourier-Transformierten (F) von x(t) und y(t) errechnet werden
Gibt es keine Korrelation von x(t) und y(t) ist Rxy = 0
-->
Rxy = F-1(F(x)·F(y))
Autokorrelationsfunktion (Rxx)
Die Korrelation eines Signals mit sich selbst wird Autokorrelation genannt.
Hierzu wird das Signal x(t) mit sich selbst, aber zeitverschoben, also x(t+τ) verglichen.
Wiederholende Verläufe im selben Signalverlauf können hiermit identifiziert werden.
Ein Beispiel ist das Auffinden von periodischen Signalen in einem verrauschten Signal.
Die Autokorrelation Rxx (Produkt von x(t) und x(t+τ)) ist natürlich ohne Verschiebung (τ=0) mit sich selbst am ähnlichsten,
d.h. es gibt bei τ=0 ein Maximum (Produkt von x(t) und x(t)).
Dieses Maximum wird auf 1 normiert:
Rxx(τ=0) =1
-> Korrelation, Kreuzkorrelation
-> Autoleistungsdichte (Autoleistungsspektrum)
-> Erwartungswert
-> Verteilungsdichte
-> Verteilungsfunktion
Kreuzleistungsdichte (Kreuzleistungsspektrum)
Die Kreuzleistungsdichte wird eingesetzt um festzustellen, welche Effekte welchen Ursachen im Frequenzbereich zuzuordnen sind. Sie ist analog der Autoleistungsdichte
, aber auf zwei Funktionen x(t) und y(t) bezogen. Sie wird aus der Mittelung mehrerer Einzelversuche bestimmt.
Die Kreuzleistungsdichte komplex und beinhaltet die relative Phase zwischen den beiden Signalen x(t) und y(t). Die Kreuzleistungsdichte kann durch die FFT der Kreuzkorrelationsfunktion ermittelt werden.
Kritische Dämpfung
Dieser Grenzfall (aperiodischer Grenzfall) einer harmonischen Schwingung liegt vor, wenn die Schwingungsamplituden asymptotisch gegen 0 gehen, also wenn keine Schwingung auftritt; Die Masse kehrt hierbei exponentiell in die Ruhelage zurück.
-> Resonanzfrequenz
Kurvenanpassung ("Curve-Fitting")
Die Kurvenanpassung ist ein Optimierungsalgorithmus mit dem versucht wird, die am besten passende Kurve durch Messpunkte zu legen.
Methode der kleinsten Quadrate
In der Messtechnik wird am häufigsten die Methode der kleinsten Quadrate verwendet.
Ein Spezialfall ist die lineare Funktion (Best Straight Line oder BSL)
Die Parameter der anzupassenden Kurve werden so gewählt, daß die Summe der quadrierten Abweichungen der einzelnen Punkte von diese Kurve minimiert werden. Im unteren Bild sieht man die Kurvenverläüfe mit unterschiedlichen Polynomgraden.

Obwohl Modellfunktionen mit vielen Freiheitsgraden meistens die Messdaten besser anpassen, bedeutet dies nicht unbedingt, dass es das bessere Modell ist, um den physikalischen Zusammenhang zu beschreiben.
Entweder:
Der Zusammenhang ist bereits erforscht. Dann wird ein bestimmter Verlauf erwartet, wie beispielsweise bei kleinen Federauslenkungen eine lineare Funktion (Hookesches Gesetz).
Oder:
Der Zusammenhang ist unbekannt. Dann könnten Anpassungen mit verschiedenen Kurvenfunktionen helfen, einen physikalischen Zusammenhang mathematisch zu beschreiben.
Labornetzteil
Als Labornetzteil bezeichnet man eine Spannungsversorgung, die stabilisierte Ausgangsspannungen zur Verfügung stellt. Häufig kann auch zwischen Konstantstrom- und Konstantspannungsmodus gewählt werden. Weiterhin lassen sich bei den meisten Labornetzteilen auch Maximalwerte für Strom und Spannung einstellen.

Auf Grund der vielfältigen Einsatzmöglichkeiten sollte ein Labornetzteil ebenso wie ein Multimeter zur Grundausstattung eines Labores gehören.
Labornetzteil mit Sense-Leitung
Hochwertige Labornetzteile besitzen oft auch einen Sense-Eingang. Sense ist die englische Bezeichnung für einen Fernfühler. Mit Hilfe dieses Eingangs können Spannungsverluste, die unter Umständen durch lange Anschlusskabel verursacht werden, ausgeglichen werden. Dazu werden zwei weitere Kabel benötigt, die die tatsächlich am Verbraucher anliegende Spannung zurück zum Sense-Eingang führen (6-Leiter-Schaltung). Sollte es nun bedingt durch den Widerstand des Anschlusskabels zu einem Spannungsabfall am Verbraucher kommen, wird dies am Labornetzteil registriert und die Ausgangsspannung entsprechend nachgeregelt.
Hier ist ein Beispiel für eine Schaltung für Messwertaufnehmer oder Sensoren, mit Sense-Leitung:

Labornetzteil, bipolar
Für manche Anwendungen ist ein bipolares Netzteil erforderlich, das bezogen auf den gemeinsamen Nullpunkt einen positiven und einen negative Ausgang liefert.

Es ist aber auch möglich zwei monoplare Ausgänge zu einem biploaren Ausgang zu schalten:

Hier ist ein Beispiel für eine Schaltung für Messwertaufnehmer oder Sensoren, die ein bipolares Netzteil benötigen:

-> Brückenverstärker
-> Wheatstonesche Messbrücke
-> Netzteil, bipolar
-> Speisespannung
Ladungsausgang
Enthalten piezoelektrische Sensoren keine interne Signalverarbeitung (IEPE-Schaltkreis), so stellen sie lediglich einen hochohmigen Ladungsausgang zur Verfügung. Dieser ist direkt mit dem Quarz verbunden und es kann dort die erzeugte Ladung entnommen werden.
Ladungsbetrieb
Werden piezoelektrische Sensoren , die einen Ladungsausgang besitzen, eingesetzt, so spricht man vom Ladungsbetrieb.
Vergleich mit IEPE-Sensoren:
Vorteil: höherer verwendbarer Temperaturbereich des Sensors
Nachteil ohne externem Ladungsverstäker: Starke Fehleranfälligkeit bei Feuchte, Kabelbewegungen und Änderung der Leitungslängen
Nachteil mit externem Ladungsverstäker: umständliche Handhabung
-> IEPE-Schaltkreis
Ladungsverstärker
Ein Ladunsgverstärker erzeugt ein zur anliegenden Ladung proportionales, niederohmiges Spannungssignal.
Er findet Verwendung beim Ladungsbetrieb piezoelektrischer Aufnehmer.
-> IEPE-Schaltkreis
Lagertemperaturbereich
Wird ein Gerät bei Temperaturen innerhalb des Lagertemperaturbereichs gelagert, so ändern sich die im Datenblatt spezifizierten Werte nicht.
Laserwegaufnehmer
Ein Laserwegsensor misst den Abstand durch das Prinzip der optischen Triangulation oder durch das Prinzip des Doppler-Effekts.
Lastwiderstand
Der Lastwiderstand ist der elektrische Widerstand, des Gerätes, dass an einem Signalausgang angeschlossen ist.
-> Bürde
Linearität, Nichtlinearität
Die maximale Abweichung zwischen einer idealen geraden Kennlinie und der realen Kennlinie bezeichnet man als Nichtlinearität.

-> Kalibrierung bei 50% vom Nennbereich
-> Gesamtgenauigkeit
-> Hysterese
-> Wiederholbarkeit.
Linearisierung
Die Nichtlinearität einer nichtlinearen Sensorkennlinie kann durch Linearisierung nahezu eliminiert werden.Dies kann beispielsweise durch eine stückweise lineare Interpolation erfolgen. Hierzu benutzt man Wertepaare einer Mehr-Punkte-Kalibrierung. Der Kurvenverlauf zwischen den Wertepaaren wird näherungsweise durch einen geraden Velauf beschrieben (blau gestrichelt in der unteren Abbildung). Die Abweichung von der realen Kennlinie (rot), und somit die Nichtlinearität, ist minimal im Vergleich zur oberen Abbildung.

Die Linearisierung erflolgt entweder über Software, eine externe Signalaufbereitung oder durch eine direkt in das Gehäuse des Messwertaufnehmers integrierte Elektronik.
-> Kalibrierung
-> Kalibrierung bei 50% vom Nennbereich
-> Fehler
-> Hysterese
-> Wiederholbarkeit
-> thermisches Verhalten
-> thermische Nullpunktverschiebung
-> thermische Sensitivitätsänderung
-> Signalaufbereitung
Liniendruck
Liniendruck ist der Druck, der in einem geschlossenem System herrscht.
-> Druck
-> Druckstoß
-> Differenzdruck
-> Systemdruck
Lorentz-Kraft
Bewegt sich ein elektrisch geladenes Teilchen (q) durch ein Magnetfeld (B) so erfährt es eine Kraft (FL) senkrecht zu Bewegungs- und Magnetfeldrichtung.
Das Vorzeichen der Ladung q bestimmt die Richtung der Ablenkung.

FL = q × v × B × sin(alpha)
wobei:
q = elektrische Ladung des Teilchens
v = Geschwindigkeit des Teilchens
B = magnetische Flussdichte
alpha = Winkel zwischen v und B
Lorenzkraft: Rechte Hand Regel

-> Hall-Effekt
Low-Noise-Kabel (=rauscharmes Kabel)
piezoelektrische Beschleunigungsaufnehmer mit Ladungsausgang sollten Low-Noise-Kabel verwenden, um Fehler zu minimieren.
Low-Noise-Kabel besitzen eine leitfähige Schicht, die auf die Isolierung (Dielektrikum) aufgetragen wird (z.B. CPVC = Conductive PVC).

Das Beispiel unten zeigt die Vorteile von Low-Noise Kabeln:
Das Kabel wird gebogen und ein Bereich entsteht, in dem die Abschirmung kein Kontakt mit der Isolierung (Dielektrikum) hat.
In der ersten Zeichnung ist ein Standardkabel abgebildet, ohne leitfähige Schicht auf der Isolierung.
Ladungen können sich im kontaktfreien Bereich durch das Reiben der verschiedenen Materialien miteinander ansammeln (Triboelektrischer Effekt).

Bei einer späteren Kontakt der Abschirmung mit der Isolierung - z.B. durch das Zurückbiegen des Kabels - kann diese gesammelte Ladung auf einmal abgeleitet werden.
Spitzen im Signal sind die Konsequenz.

Low-Noise-Kabel verhindern das Entstehen solcher Spitzen im Signal durch das kontinuierliche Ableiten der Ladungen durch die leitfähige Schicht.
Luftdämpfung
Sensoren, die mikromechanisch gefertigt werden, haben ein sehr dünnes Luftpolster zwischen den Siliziumschichten. Dieses Luftpolster verhindert, dass die Sensoren resonieren und dient als mechanisches Filter.
Bei Sensoren, die nicht mikromechanish gefertigt werden, ist die Luftschicht nicht dünn genug, um ein Luftpolster zu bilden. Man spricht zwar hier auch von luftgedämpften Sensoren, die Dämpfung reicht aber nicht aus, um zu verhindern, dass sie im Resonanzfrequenzbereich schwingen.
Luftgedämpfte Systeme haben viele Vorteile gegenüber ölgedämpften Systemen:
- ein sehr gutes Phasenverhalten
- eine sehr geringe Abhängigkeit von der Temperatur
- keine Entlüftungsprobleme
-> mechanische Filter
LVDT, Linear Variable Displacement Transducer

Die LVDTs benutzen ein Wegmessverfahren auf induktiver Basis. Die Primärwindungen werden mit einer konstanten Wechselspannung gespeist, die ein magnetisches Wechselfeld erzeugt und in den Sekundärwindungen - abhängig von der Lage des Kerns - ein Signal induziert.
-> weitere Wegaufnehmer
LVIT, Linear Variable Inductance Transducer

Die LVIT's bestehen aus zwei in Serie geschalteten Spulen, die mit einer konstanten Wechselspannung Vs versorgt werden. Die Impedanzen der beiden Spulen werden durch einen ferromagnetischen Kern beeinflusst.
In der Nulllage des Kerns ist sein Einfluss auf beide Spulen gleich, so dass am Mittelanschluss die halbe Versorgungsspannung anliegt.
Verschiebt sich der Kern, ist sein Einfluss nicht mehr symmetrisch, so dass die nun am Mittelanschluss anliegende Spannung ein Maß für die Position des Kerns ist.
Die LVIT's stellen also eine Wheatstonesche Halbbrücke dar. Daher werden LVIT's auch als Half Bridge Transducer (HBT) bezeichnet.
-> weitere Wegaufnehmer
magnetoresistiver Effekt
Der elektrische Widerstand anisotroper Materialien verändert sich durch das Anlegen externer Magnetfelder. Der Grund für diese Wiederstandsänderung liegt darin, dass die Streuwahrscheinlichkeit von Leitungselektronen zwischen den Bändern von der Orientierung des Elektronen-Spins abhängt. Die Orientierung des Elektronen-Spins wiederum wird durch das Anlegen von Magnetfeldern beinflusst.
Der Widerstand ist außer vom Magnetfeld auch von der Richtung des Stromflusses zum Magnetfeld abhängig. Bleibt das Magnetfeld konstant, so ist der Widerstand bei paralleler Ausrichtung des Stromflusses zum Magnetfeld einige Prozent größer als bei senkrechter Ausrichtung. In dieser nichtlinearen Kennlinie gibt es aber einen schmalen Bereich um 45°, in dem die Abhängigkeit zwischen Winkeländerung und Widerstand (bei konstantem Magnetfeld) annährend linear ist.

Um zu erreichen, dass der Strom in einem Winkel von 45° relativ zum Magnetfeld fließt, verwendet man die sogenannte "Barberpol" Anordnung (benannt nach dem Innungszeichen der Barbiere).

Hierbei werden entlang eines magnetoresistiven Streifens (MRS) mehrere Querstreifen aus leitfähigem Metall um 45° zum Messstreifen gedreht angebracht. Sie stellen näherungsweise Äquipontenziallinen dar und bewirken, dass der Strom auf dem kürzesten Weg von Querstreifen zu Querstreifen, also um 45° gegenüber dem Messstreifen gedreht, fliesst.
Thermische Fehler werden durch die Anordung der MRS als minaturisierte Wheatstonsche Brückenschaltung verringert: Die MRS liegen dabei sehr nahe beieinander auf einem Substrat mit hoher Wärmeleitfähigkeit, so dass es kaum Temperaturunterschiede zwischen den Streifen gibt.
-> Neigungssensor, magnetoresistiver
Magnetostriktion
Wird an einem ferromagnetischen Stoff ein äußeres Magnetfeld angelegt, so wird er deformiert (10 bis 1000 µm/m). Dieser Effekt wird Magnetostriktion genannt.
Magnetostriktion, inverse
Hierbei ändert sich das Feld eines ferromagnetischen Stoffes, wenn dieser mechanisch deformiert wird.
-> PCME (Pulsed Current Modulation Encoding)
-> Drehmomentaufnehmer, PCME
Magnetostriktive Wegaufnehmer
Magnetostriktive Sensoren sind berührungslose, verschleißfreie Wegaufnehmer. Sie bestehen aus einem ferromagnetischen Messelement (Wellenleiter), und einem Magnetring.

Ein Strompuls wird aus der Sensorelektronik durch den Wellenleiter geschickt. Im Bereich des Positionsmagneten entsteht eine Torsionswelle (Wiedemann-Effekt), die als Körper-Ultraschallwelle zu den Enden des Wellenleiters läuft. Am freien Ende wird die Ultraschallwelle durch einen Dämpfer absorbiert, am anderen Ende durch einen Ultraschallempfänger detektiert (Villary-Effekt).
Die Laufzeitdifferenz zwischen dem Strompuls und der Torsionswelle ist proportional zur Entfernung des Magnetrings vom Anfangspunkt des Wellenleiters.
-> weitere Wegaufnehmer
Manometer
-> Druckmessgerät
Masseschleifen
Wenn Aufnehmergehäuse nicht erdfrei sind, können in einem Messsystem Erdungspunkte auf unterschiedlichen elektrischen Potentialen liegen. Dadurch kann es zum Entstehen von Störspannungen kommen.

-> Rauschen
Masse, seismische
Die seismische Masse ist die Masse, die auf Grund der wirkenden Beschleunigung eine Kraft auf das Sensorelement in Beschleunigungsaufnehmern ausübt.
Materialprüfung
Die Materialprüfung dient dazu, Schäden, wie zum Beispiel Risse, an Bauteilen festzustellen. Dies kann zum einen geschehen, wenn das Bauteil nicht in Betrieb ist (siehe z.Bsp. Strukturanalyse, Modalanalyse, Impulshammer), oder aber zum anderen auch während des Betriebes (siehe z.Bsp. Lagerüberwachung).
-> Hüllkurven-Demodulation
-> Materialprüfung
-> Modalanalyse
-> Strukturanalyse
mechanische Filter
Mit analogen Filtern kann man Aliasingeffekte verhindern, mit digitalen Filtern störende Frequenzen herausfiltern.
Wenn mechanische Strukturen im Resonanzbereich stark zu schwingen anfangen, kann man dieses Verhalten zwar mit digitalen Filtern untersuchen, jedoch nicht verhindern.
Insbesondere Feder-Masse-Systeme wie Beschleunigungsaufnehmer können im Resonanzbereich zestört werden.
Um dies zu verhindern, ist es notwendig, diese Systeme mechanich zu filtern. Dies kann mann dadurch erreichen, dass man das Medium, in dem sie Schwingen, mit einer zähflüssigen Flüssigkeit wie Silikonöl füllt (Öldämpfung).
Bei mikromechanisch gefertigten Systemen wird die Dämpfung durch ein dünnes Luftpolster erreicht (Luftdämpfung).
-> Beschleunigungsaufnehmer, MEMS
Medientemperatur
Als Medientemperatur wird die Temperatur des Mediums mit dem ein Messwertaufnehmer in Kontakt steht bezeichnet. Die Medientemperatur darf nicht außerhalb des zulässigen Arbeitstemperaturbereiches
(Betriebstemperatur) des Messwertaufnehmers liegen.
MEMS
Abkürzung für Micro Electrical Mechanical Systems (auf Deutsch Mikrosystemtechnik, Abk.: MST).
MEMS sind elektrische und mechanische Systeme im Mikrometerbereich. Sie stellen eine Verschmelzung der Mikroelektronik und Mikromechanik dar.
-> Beschleunigungsaufnehmer, MEMS
-> Beschleunigungsaufnehmer, MEMS-Servo
Messbereich
In diesem Bereich müssen die zu messenden physikalischen Größen liegen, die ein Messwertaufnehmer in elektrische Signale wandeln soll. Messbereiche können bipolar (z.B. ± 100N) oder unipolar (z.B. 0 bis 100bar) sein.
Messtaster

Messtaster sind induktive Wegaufnehmer, die für besonders kleine Messwege geeingnet sind. Sie bieten eine Genauigkeit von einigen Mikrometern und werden auch eingesetzt, um Oberflächen abzutasten.
Inkrementale Messtaster bieten eine bessere Linearität als induktive Messtaster.
Induktive Messtaster bieten eine bessere Wiederholgenauigkeit als inkrementale Messtaster.
Induktive Messtaster werden eher für Vergleichsmessungen eingesetzt, während inkrementale Messtaster für Messungen eingesetzt werden, die eine hohe Messgenauigkeit auf dem gesamten Messweg erforden.
-> LVDT, Linear Variable Differential Transformer
-> LVIT, Linear Variable Inductance Transducer
-> weitere Wegaufnehmer
Messwertaufnehmer
Einen Sensor mit integrierter Mikroelektronik zur Signalaufbereitung bezeichnet man als Messwertaufnehmer.
-> Beschleunigungsaufnehmer
-> Drehmomentaufnehmer
-> Druckaufnehmer
-> Kraftaufnehmer
-> Wegaufnehmer
Messwertübertragung
Zur Übertragung eines Messwertes vom Messwertaufnehmer zu den Geräten der Signalverarbeitung stehen verschienden Möglichkeiten zur Verfügung.
Typischerweise werden Messwerte in folgender Form übertragen:
- analog als Spannungs- oder Stromsignal (z.Bsp. 0-10V, 4-20mA)
- digital nach entsprechender A/D-Wandlung (z.Bsp. per RS-232-Schnittstelle)
- inkremental codiert als Folge von Rechteckimpulsen (z.Bsp. bei Seilzugwegaufnehmern)
Microfusing ist ein Verfahren um mikromechanisch gefertigte Dehnungsmessstreifen auf Metalloberflächen mit einer hocherhitzten (550 °C) Glasmasse zu binden (Glas-Bonden oder Löten mit Glaslot). Ein vollautomatisiertes und hocheffizientes Produktionsverfahren ermöglicht das Applizieren von DMS auf Oberflächen zu einem bisher nicht für möglich gehaltenen, niedrigen Preis. Erste kommerzielle Anwendungen waren Haushalts-Personenwaagen in den frühen 90-er Jahren. Das Verfahren wurde 2005 von Measurement Specialties Inc. für Kraft- und Drucksensoren optimiert.
Mikroelektronik
Unter Mikroelektronik versteht man miniaturisierte Elektronikbauteile (meistens Widerstände, Kondensatoren und Transistoren), die auf einem Substrat aufgebracht werden (-> IC). In Messwertaufnehmern werden mikorelektronische Schaltkreise beispielsweise zur Signalaufbereitung, zur Temperaturkompensierung und zur Linearisierung integriert.
Durch die Miniaturisierung ist es sogar möglich, signalaufbereitende Elektronik in Miniaturaufnehmer zu integrieren.
->IEPE-Schaltkreis
-> Hybrid-Verstärker
Mikromechanik
Durch gezieltes Ätzen von mehreren Schichten Silizium und anschliesendem Zusammenkleben dieser Schichten ist es möglich, 3-Dimensionale mechanische Strukturen zu erzeugen. Durch die Kombination dieser mechanischen Strukturen mit in diesen Strukturen durch Dotieren erzeugten elektronischen Bauelementen (MEMS, MST) lassen sich Sensoren (z.B. MEMS-Beschleunigungsaufnehmer) oder auch komplexe Geräte wie Motoren herstellen.
Miniaturaufnehmer
Miniaturaufnehmer sind Messwertaufnehmer mit möglichst geringem Gesamtgewicht und geringen Abmessungen. (z.B. bei Druckaufnehmern eine Messmembran von 3mm Ø)
Mittelrauhwert, Rauhtiefe (Ra)
Der Mittelrauhwert ist das arithmetische Mittel der Profilabweichungen von der mittleren Linie innerhalb einer Messstrecke.
Als Rauhtiefe wird die Höhendifferenz zwischen dem tiefsten und höchstem Punkt dieser Linie bezeichnet.
Mittenfrequenz
Die Mittenfrequenz f0 eines Filters ist das geometrische Mittel zwischen der unteren Grenzfrequenz f1 und der oberen f2.
Modalanalyse
Die Modalanalyse ermittelt die dynamischen Eigenschaften einer Struktur unter Vibration.
Sie findet meist im Rahmen einer umfassenden Schwingungsanalyse statt.
Der Name "Modal"analyse kommt von der verwendeten Methode, die schwingende Gesamtstruktur auf eine endliche Anzahl einzelner "Schwingungsmoden", also Schwingungsarten und -formen (siehe folgendes Beispiel) zu reduzieren. Diese wiederum lassen sich mit im allgemeinen gekoppelten 1-Massen-Schwinger simulieren, die jeweils mit einer spezifischen Frequenz (Eigenfrequenz) schwingen.
Beispiel: Ein Stab, der an zwei Enden befestigt ist, kann:
- mit einem "Bauch" schwingen, entsprechend einer halben Wellenlänge der Eigenfrequenz (Grundresonanzfrequenz) -->: 1. Mode
Das kann mit einem 1-Massen-Schwinger simuliert werden.

-
oder mit zwei "Bäuchen" entsprechend der ganzen Wellenlänge der Eigenfrequenz (ohne Bild) -->: 2. Mode
Zur Simulation eines solchen Systems braucht man mindestens zwei gekoppelte 1-Massen-Schwinger. - ... usw.
Als Ilustration hier noch ein Bild der 4. Mode (2 ganzen Wellenlängen der Eigenfrequenz)
Zur Simulation dieses Systems braucht man mindestens vier gekoppelte 1-Massen-Schwinger.
Generell ist die Moden-Ordnungszahl (q) die Anzahl der halben Wellenlängen (λ/2) also:
1. Mode = 1 ⋅ λ/2
2. Mode = 2 ⋅ λ/2 ... etc.
∴ Gesamtlänge L = q ⋅ λ/2

Bei der Modalanalyse werden die modalen Größen, die die mechanische Struktur charakterisieren (Eigenmoden), untersucht. Diese charakteristischen Werte nennt man auch Eigenwerte.
Die Modalanalyse ist also einer Eigenwertanalyse ähnlich, wobei die Resonanzfrequenzen und Dämpfung durch Systempole und die Form der Moden durch Eigenvektoren wiedergegeben werden.
Die Modalanalyse unterscheidet sich von der reinen Betriebsschwingformanalyse in der nur die Antwortsignale während des Betriebs analysiert werden und die meistens vor einer Modalanalyse erfolgt.
Es gibt verschiedene Arten der Modalanalyse:
analytische Modalanalyse (AMA, Analytic Modal Analysis)
Hier wird die Analyse nicht experimentell, sondern rein mathematisch durch das Lösen von Differentialgleichungen mit entsprechenden Randbedingungen mit der Finite Elemente Methode (FEM) durchgeführt.
Dabei wird beispielsweise die Verformung eines Autos numerisch berechnet, in dem das Objekt in endliche (finite) Elemente unterteilt wird, die endlich (finit) klein sind.
Die Anzahl der verwendeten Elemente hängt von der Anwendung ab. Die vorhandene Rechenleistung begrenzt diese Zahl nach oben. Hier ein Bild eines virtuell gecrashten FEM-Modells eines Autos:

experimentelle Modalanalyse (EMA, Experimental Modal Analysis)
Hier wird die Modalanalyse experimentell durchgeführt: die Struktur wird durch bekannte Größen (Kräfte) angeregt und die Übertragungsfunktion ermittelt und analysiert (siehe auch FFT-Analyse). Sie wird durchgeführt mit
- Impulshammer - der zur Bestimmung der Anregung in die Spitze einen Kraftsensor integriert hat - und Beschleunigungsaufnehmer(n)
- Shaker und Beschleunigungsaufnehmer(n). Hier wird die anregende Kraft durch einen weiteren Beschleunigungsaufnehmer am Shaker bestimmt
Im Unterschied zur EMA sind hier die Eingangsgrößen nicht bekannt.
Die Anregung - beispielsweise durch Klopfen mit der Faust oder beim PKW mit Motor im Leerlauf statt mit einem Impulshammer - reicht aus, da das Signal des Hammers als Eingangsgröße nicht benötigt wird.
Hier wird nur die Antwortfunktion analysiert, beispielsweise mit einem Cross-Over Spektrum.
Das Anregungssignal sollte breitbandig sein, idealerweise stochastisches, weißes Rauschen.
Stabilisierungsdiagramm
Im Stabilisierungsdiagramm werden die Übertragungsfunktion (Y-Achse links, schwarze Kurve) und die nötigen 1-Massen-Schwinger (Y-Achse rechts, Buchstaben) dargestellt.
Diese 1-Massen-Schwinger spiegeln die bei der Analyse verschiedener Ordnungen gefundenen möglichen Pole wieder. Je höher die Ordnung und damit je mehr Freiheitsgrade es gibt, desto mehr Pole sind mathematisch möglich und tauchen auf. Sie müssen in einem weiteren Schritt selektiert werden.
Hierbei ist es wichtig physikalische (echte) Pole von mathematischen/unechten Pole zu separieren.
Die Pole, die jeweils innerhalb bestimmter Grenzen der Frequenz, Dämpfung und Eigenvektoren liegen werden mit entsprechenden Buchstaben abgebildet:

Modal Assurance Critereon (MAC-Matrix)
Die MAC-Matrix wird benutzt um zu bestimmen, ob Moden voneinander klar separierbar und stabil sind.
Hierbei werden die Schwingformen zweier Moden-Sätze verglichen und der Grad der Übereinstimmung in einer Matrix dargestellt.
 | Moden (1.) (2.) (3.) (4.) (5.) (6.) (1.) 100% 2% 0% 0% 1% 0% (2.) 2% 100% 0% 1% 0% 0% (3.) 0% 0% 100% 1% 1% 0% (4.) 0% 1% 1% 100% 1% 3% (5.) 1% 0% 1% 1% 100% 41% (6.) 0% 0% 0% 3% 41% 100% |
modale Größen
Als modale Größen werden Dämpfung, Eigenfrequenz, Eigenschwingform, Eigenschwingung, Resonanzfrequenz bezeichnet.
-> Strukturanalyse
-> Modalanalyse
MOSFET
Abkürzung: für Metall-Oxyd-Semiconductor-Feldeffekttransistor
MOSFETS gehören zu den unipolaren Transistoren. Sie benötigen keinen Strom zur Ansteuerung, sondern lediglich eine Spannung. Der Gate-Eingang der MOSFETs ist hochohmig. Auf Grund dieser Eigenschaft werden MOSFETs als Ladungsverstärker in IEPE - Messwertaufnehmern verwendet.
Im Vergleich zu JFETs können MOSFETs bei höheren Temperaturen eigesetzt werden, sind aber nicht ganz so rauscharm.
-> FET (Field Effect Transistor)
-> JFET
Motorklopfen
Das Klopfen bei Verbrennungsmotoren tritt mormalerweise auf, wenn ein Fahrzeug unter Volllast betrieben wird. Hierbei treten unkontrollierte Verbrennungen (z.B. Selbstentzündung des Kraftstoffes).
Zu Untersuchung dieses Phänomens werden piezoelektrische Sensoren mit hohem Messbereich und hohen Resonanzfrequenzen eingesetzt, da die Stöße auch hohe Frequenzen anregen.
-> Dirac-Stoß
-> Delta-Funktion
-> Fehlersuche, piezoelektrische Sensoren
MST
Abkürzung für: Mikrosystemtechnik
-> MEMS
Multikomponentenkraftmessung
Bei der Multikomponentenkraftmessung wird lediglich ein Sensor zur Messung von Kraftkomponenten in allen drei Raumrichtungen benötigt.
-> Triaxialaufnehmer
Multimeter
Ein Multimeter ist ein Messgerät zur Messung von elektr. Spannung, elektr. Strom und elektr. Widerstand.

Dabei kann durch einen Umschalter die zu messende Größe und der Messbereich festgelegt werden.
Die Anzeige des Messwertes erfolgt bei analogen Multimetern durch ein Drehspulinstrument, bei digitalen Multimetern mit Hilfe eines LCD- oder LED-Displays.
Einige Arten von Digitalmultimetern besitzen zusätzlich eine RS-232-Schnittstelle. So kann der Messwert einfach in einen PC übernommen werden. Dies geschieht im Allgemeinen aber mit einer Abtastrate von wenigen Hz, so dass sie keinen wirklichen Ersatz für Datenerfassungskarten oder Datenlogger darstellen.
Prinzipiell ist ein Multimeter nicht zur Messung von zeitlich schnell veränderlichen Größen geeignet. So lassen sich Rauschen oder kurzzeitige Spannungs- oder Stromspitzen (Peaks) im Allgemeinen mit einem Multimeter nicht detektieren.
Auf Grund der einfachen Bedienbarkeit und der vielfältigen Einsatzmöglichkeiten sollte ein Multimeter zusammen mit einem Labornetzteil zu einer Laborgrundausstattung gehören.
Insbesondere zur Fehlersuche bei (DMS - ) Sensoren werden Multimeter benötigt, da dazu Widerstands- und Spannungsmessungen durchgeführt werden müssen.
Neigungssensor, elektrolytischer
Elektrolytische (oder auch konduktive) Neigungssensoren (Inklinometer) basiern auf der Bewegung einer Gasblase in einer mit elektrisch leitfähiger Flüssigkeit gefüllten Glashülle. Die Glashülle ist hermetisch dicht und mit Platin-Elektroden bestückt.

Unten in der Glashülle befindet sich mittig eine Kollektor-Elektrode; oben symmetrisch dazu zwei Emitter-Elektroden. Eine Neigung des Sensors bewirkt eine Bewegung der Gasblase, so dass unterschiedliche Mengen an Flüssigkeit zwichen den Emitter-Elektroden und der Kollektor-Elektrode liegen. Die dadurch verursachte Änderung der Impedanz ist proportional zur Neigung. Der Messbereich hängt von der Länge der Emitter-Elektroden und dem Krümmungsradius der Glashülle ab.
Ein weiterer Aufbau eines elektrolytischen Neigungssensors ist in der folgenden Abbildung dargestellt:

Neigungssensor, kapazitiver
Kapazitive Neigungssensoren (Inklinometer) funktionieren prinzipiell wie kapazitive Beschleunigungsaufnehmer.
Eine freibeweglich gelagerte Masse richtet sich stets senkrecht zur Schwerkraft aus. Diese Masse befindet sich zwischen zwei Kondensatorplatten, so dass sich bei Bewegung der Masse die Kapazität des Kondensators ändert. Somit ist die Kapazität des Kondensators ein Maß für die Ausrichtung des Kondensators relativ zur Schwerkraft.
Neigungssensor, magnetoresistiver
Magnetoresitive Neigungssensoren (Inklinometer) nutzen den Effekt aus, dass sich der Widerstand eines Leiters in Abhängigkeit eines Magnetfeldes ändert (magnetoresistiver Effekt).
Dazu werden zwei Magnete frei beweglich in der Nähe zweier magnotoresistiven Elemente, die einen Spannungsteiler bilden, angebracht. Neigt man dieses System nun, ändert sich die Lage der Magnete relativ zu den Elementen.
Bei 0° sind die Magnete genau in der Mitte der beiden magnetoresistiven Elemente. In diesem Fall sind die Widerstände der Elemente gleich (MR1 = MR2), so dass Uaus = 50% von Uein ist. Bei einer Bewegung in eine Richtung ändert sich der Widerstand der Elemete und erzeugt damit eine lineare Veränderung des Ausgangssignals proportional zur Neigung.

NEMA-Klassifikation
Die NEMA-Klassifikation definiert Schutzarten ähnlich den IP-Schutzarten.
Umwandlung von NEMA-Klassifikationen in IP-Schutzarten:
(Allerdings sind die Prüfbedingungen und Anforderungen nicht exakt miteinander vergleichbar.)
| NEMA | Verwendung | Bedingung | IP-Schutzart |
| 1 | In Innenräumen | Schutz gegen begrenzte Menge Schmutz | IP20 |
| 2 | In Innenräumen | Schutz gegen Eindringen von Tropfwasser und Schmutz | nicht definiert |
| 3 | Im Freien | Schutz gegen Staub, Regen | IP64 |
| 3R | Im Freien | Schutz gegen fallenden Regen | IP22 |
| 3S | Im Freien | Schutz gegen Staub, Regen, Hagel | IP64 |
| 4 | In Innenräumen oder im Freien | Schutz gegen Spritzwasser, Staub, Regen | IP66 |
| 4x | In Innenräumen oder im Freien | Schutz gegen Spritzwasser, Staub, Regen; korrosionsgeschützt | IP66 |
| 6 | In Innenräumen oder im Freien | Schutz gegen Staub, Wasserstrahl und Wasser während vorübergehenden Untertauchens | IP67 |
| 6P | In Innenräumen oder im Freien | Schutz gegen Wasser während längeren Untertauchens, korrosionsgeschützt | nicht definiert |
| 11 | In Innenräumen | Schutz gegen Tropfwasser, korrosionsgeschützt | nicht definiert |
| 12,12K | In Innenräumen | Schutz gegen Staub, Tropfwasser | IP55 |
| 13 | In Innenräumen | Schutz gegen Staub, Spritzwasser, Öl und nichtkorrodierende Flüssigkeiten | IP65 |
Nenndruck
Der Nenndruck ist der Druck, für den Geräte oder Anlagen unter definierten Bedingungen zur Erzielung der Funktionsfähigkeit ausgelegt sind.
-> Druck
-> Solldruck
Nichtlinearität
-> Linearität
Niederfrequenzverhalten
Piezoelektrische Aufnehmer besitzen nicht über den gesamten Frequenzbereich die gleiche Empfindlichkeit, sondern bei niedrigen Frequenzen eine deutlich geringere.
NIST
Abkürzung für: National Institute of Standards and Technology
(in den USA; ehemals NBS, National Bureau of Standards)
Normdruck
Normdruck=1013 mbar absolut
(1 physikalische Atmosphäre= 1 bar = 1000 mbar = 1 hPa)
-> Druck
normierte Empfindlichkeit
-> normierte Sensitivität
normierte Sensitivität
Um die Ausgangssignale von Messwertaufnehmern auf DMS-Basis direkt analog miteinander verarbeiten zu können, müssen diese die gleiche Empfindlichkeit besitzen. Daher bieten Hersteller Messwertaufnehmer mit sogenanntem normierten Ausgang an, deren Empfindlichkeit stets innnerhalb eines spezifierten Wertebereiches liegt. Dadurch ist auch gewährleistet, dass defekte Sensoren einfach ersetzt werden können, ohne das eine Neukalibrierung des gesamten Messaufbaus notwendig wird.
normierter Ausgang
-> normierte Sensitivität
NVH
NVH ist die Abkürzung für 'Noise, Vibration and Harshness' also Geräusche, Vibrationen und Rauhigkeit.
Hierbei werden Ursachen von Laufruhestörungen untersucht, vom hörbaren (Geräusche) bis zum fühlbaren Bereich (Vibrationen). Der Übergang vom hörbaren zum fühlbaren Bereich wird als 'Rauhigkeit' bezeichnet. Hierbei wird am Prüfling versucht Schwingungsquellen und die mechanischen Strukturen die diese Schwingungen anregen zu lokalisieren. Ziel ist es, durch geeignete Veränderungen diese Störungen zu minimieren.
Nyquist-Shannon Theorem
Die Abtastfrequenz muss mindestens doppelt so hoch sein wie die höchste im Signal vorhandene Frequenz, um Signalverfälschungen zu vermeiden (wurde unabhängig von Herrn Kotelnikow entdeckt).
-> Abtastrate
-> A/D-Wandlung
-> Aliasingeffekt
Offset, Nullpunktversatz
Das Ausgangssignal eines Sensors ist im unbelasteten Zustand im Allgemeinen ungleich Null. Dieser Nullpunkt-Versatz wird als Offset bezeichnet.
Ein Offset kann auch durch eine Vorlast, durch Temperaturänderungen oder wegen interner Elektronik entstehen.
Bei DMS-Widerstandsbrücken sind die eingesetzten Widerstände nicht exakt gleich, was zu einem systembedingten kleinen (aber konstanten) Offset führt.
Sensoren, die einen solchen Offset haben sind nicht minderwertig, auch wenn sie neu sind!
Offsetabgleich, Nullpunktabgleich
-> Tarieren
-> Sensitivität
Ohmmeter
Ein Ohmmeter ist ein Messgerät zur Messung des elektrischen Widerstands.
Neben dem analogen Ohmmeter, das ein Drehspulinstrument zur Anzeige benutzt, gibt es auch digitale Ohmmeter, die eine LED- oder LCD-Anzeige benutzen.
Eine besondere Bauart des Ohmmeters ist der sogenannte Durchgangsprüfer. Mit ihm lässt sich der elektrische Widerstand nicht genau messen, er zeigt lediglich durch ein akustisches Signal an, ob eine elektrische Verbindung besteht.
-> Multimeter
Öldämpfung
Ölgedämpfte Systeme haben den Vorteil, dass sie eine starke Dämpfung erreichen können, auch wenn die Abmessungen größer sind als bei mikromechanisch gefertigten Systemen.
Die Nachteile sind:
- das nicht so gute Phasenverhalten
- die Temperatur beinflusst die Viskosität und somit die Dämpfung
- die Möglichkeit der Blasenbildung, falls das Medium nicht sauber entlüftet wird
-> Beschleunigungsaufnehmer, piezoresistiv
-> mechanische Filter
-> Luftdämpfung
Ordnungsanalyse
Bei der Schwingungsanalyse an rotierenden Systemen wird das Frequenzspektrum in ein ganzzahliges Vielfaches der aktuellen Drehzahl umgerechnet und man erhält das Ordnungsspektrum.
Die erste Ordnung entspricht dann der aktuellen Drehzahl, die zweite Ordnung dem zweifachen der aktuellen Drehzahl etc.
Hier ein Beispiel für ein System das sich mit 0,24 Hz dreht:
-> Fourierreihen
Oszilloskop
Ein Oszilloskop stellt den zeitlichen Verlauf von (schnellen) Spannungsänderungen graphisch dar.

Man unterscheidet zwischen dem Analogszilloskop und der Weiterentwicklung dem Digitaloszilloskop.
Die Vorteile beider Bauarten vereint das kombinierte Analog-Digital-Oszilloskop bzw. das PC-gestützte Oszilloskop.
Oszilloskop, analog

Analogoszilloskope setzen Braunsche Röhren zur Darstellung des Signalverlaufs ein.
Dort werden an einer Kathode Elektronen erzeugt, die durch das elektrische Feld zwischen Kathode und Anode zur Anode hin beschleunigt werden. Mit Hilfe der nachfolgenden Elektronenlinse wird der Elektronenstrahl auf den Leuchtschirm fokussiert.
Als letztes durchläuft der Elektronenstrahl ein elektrisches Feld, das durch vier Ablenkplatten generiert wird. Am vertikalen Plattenpaar liegt dabei eine zur Eingangsspannung proportionale Spannung und am horizontalen Plattenpaar eine zur Zeit proportionale Spannung an. Dadurch werden die Elektronen in Y-Richtung proprotional zur Eingangsspannung und in X-Richtung proportional zur Zeit abgelenkt.
Ein sogenannter Trigger sorgt dafür, dass die X-Position zu definierten Zeitpunkten in Abhängigkeit des Eingangssignals zurückgesetzt wird. Dadurch lassen sich auch schnelle periodische Spannungsänderungen quasi als "Standbild" darstellen.
Analogoszilloskope besitzen den Nachteil, dass die dargestellten Signalverläufe nicht gespeichert werden können. Dies kann z.Bsp. für eine tiefergehende Analyse des Signalsverlaufs sinnvoll sein und ist nur mit Digitaloszilloskopen möglich.
Der Vorteil von Analogoszilloskopen ist jedoch, dass sie den Signalverlauf im Wesentlichen unverfälscht wiedergeben, solange die Bandbreite des Oszilloskops höher ist, als die des zu messenden Signals. Im Gegensatz zu Digitaloszilloskopen kann es hierbei nicht zu Informationsverlusten durch die A/D-Wandlung kommen.
Falsche Ergebnisse durch Bit-Rauschen und Aliasingeffekte, die sehr oft und meistens unbemerkt auftreten, sind somit ausgeschlossen.
Daher sollten Analogoszilloskope nach wie vor die erste Wahl zur Funktionsüberprüfung von Sensoren sein.
Oszilloskop-Simulator
Für Lehrzwecke wurde an der Technischen Universität Berlin im Rahmen einer Magisterarbeit ein virtuelles Oszilloskop erstellt.
-> Oszilloskop
-> Oszilloskop, analog
-> Oszilloskop, analog-digital
-> Oszilloskop, digital
-> Oszilloskop, PC-gestützt
Oszilloskop, digital
Bei Digitaloszilloskopen werden die Analogsignale mittels A/D-Wandler digitalisiert. Typischerweise wird hierzu ein 8-Bit Wandler verwendet, seltener kommem 12- oder 16-Bit Wandler zum Einsatz. Dadurch, dass der Signalverlauf in digitaler Form vorliegt, ist es beispielsweise möglich, eine Momentaufnahme des Signalverlaufs beliebig lange darzustellen, auch wenn das eigentliche Signal nicht mehr anliegt. Ein weiterer Vorteil ist die Möglichkeit des sogenannten "Pre-Triggers". Dieser ermöglicht es, auch den Teil des Signalverlaufs darzustellen, der zeitlich vor dem Trigger-Ereignis lag.
Der wesentliche Nachteil von Digitaloszilloskopen gegenüber Analogoszilloskopen ist der entstehende Informationsverlust (Auflösung) und schlimmstensfalls die auftretende Signalverfälschung (Aliasingeffekt). Beide Effekte haben Ihre Ursache in der A/D-Wandlung.
Es ist daher sinnvoll, Digitaloszilloskope mit einer hohen Auflösung und hoher Abtastrate einzusetzen.
Oszilloskop, analog-digital
Kombinierte Analog-Digital-Oszilloskope bieten einen sinnvollen Kompromiss zwischen Analog- und Digitaloszilloskop, indem sie die Vorteile beider Systeme in einem Gerät vereinen. Je nach Messaufgabe kann dann zwischen Analog- und Digitalmodus gewählt werden.
Oszilloskop, PC-gestützt
Rechnergestützte Datenerfassungsgeräte sind eine preisgünstige Alternative zu hochwertigen Digitaloszilloskopen. Zusammen mit einer Datenerfassungssoftware bieten sie deutlich mehr Flexibilität und erweiterte Analysefunktionen. Diese übertreffen in Vielfalt und Qualität teilweise deutlich die Funktionen hochwertiger Digitaloszilloskope.
Da PC-gestützte Oszilloskope, ähnlich wie Digitaloszilloskope, einen A/D-Wandler besitzen, können bei unsachgemäßer Handhabung Fehler durch zu geringe Auflösung und Aliasingeffekte entstehen.
Pascal
Das Pascal ist eine Einheit des Drucks.
PCME (Pulsed Current Modulation Encoding)
Dieses Messprinzip basiert auf der permanenten Veränderung des magnetischen Verhaltens eines magnetischen Materials. Die Welle des Drehmomentaufnehmers wird über ein spezielles Verfahren dauerhaft mit einem Muster magnetisiert. Damit wird die gesamte Welle zum Teil des Sensors (Primärsensor).
Tritt ein Drehmoment auf, gibt es eine Magnetfeldänderung proportional zum Drehmoment ((inverse magnetostriktiver Effekt). Diese Änderung wird durch winzige Magnetfeld-Sensorspulen (Sekundärsensor) abgetastet, die in der Nähe der Welle positioniert sind. Die SCSP-Elektronik (Signal Conditioning and Signal Processing), treibt die magnetischen Abtasteinheiten und wandelt das magnetisch abgetastete Signale in Messsignale um. Zwei Spulen, die im Differential-Mode arbeiten, werden benötigt um Störfelder zu neutralisieren.
Die Vorteile sind:
- keine mechanische Änderung an der Welle
- wartungsfrei, da berührungslos
- Beständigkeit gegen Wasser, Salzwasser, Getriebeöl und andere Medien
- hohe Bandbreite
- kostengünstig
Umlaufmodulation bei PCME-Drehmomentsensoren
Da die Struktur einer Welle über deren Umfang nicht 100% homogen ist, variiert das PCME-Magnetisierungsmuster auch entsprechend und verursacht eine Veränderung des Signals über den Umfang der Welle - auch ohne Last. Diesen Fehler nennt man Umlaufmodulation.
Trotzdem erreichen PCME-Drehmomentsensoren Genauigkeitsklassen von bis zu 0,1.
Peltiereffekt
Der Peltiereffekt ist einer der drei thermoelektrischen Effekte.
Schaltet man zwei Metalle in der Art
Metall A --- Metall B --- Metall A
in Reihe, und lässt durch sie einen Strom fließen, so kühlt sich die eine Kontaktstelle (z.B. A-B) ab und die andere (z.B. B-A) erwärmt sich.
Dieser Effekt wird in Peltierelementen durch den Einsatz von Halbleitermaterialien verstärkt, so dass sich diese zum Kühlen von Bauteilen eignen. Zu beachten ist, dass ein Peltierelement praktisch wie eine Wärmepumpe funktioniert und deshalb eine kalte und eine heiße Seite besitzt.
piezoelektrischer Effekt, direkter
Übt man auf einen Quarz (SiO2-Kristall) eine Kraft aus, so verschieben sich die in ihm enthaltenen Ladungsträger und zwischen zwei gegenüberliegenden Seiten des Quarzes bildet sich eine elektrische Spannung aus. Abhängig von der Art des Quarzes wird zwischem transversalen und longitudinalen piezoelektrischen Effekt unterschieden.

Der piezoelektrische Effekt wurde von den Brüdern Jacques und Pierre Curie1880 entdeckt.
-> Beschleunigungsaufnehmer, piezoelektrisch
Piezoelektrischer Effekt, inverser
Beim inversen piezoelektrischen Effekt verformt sich der Quarz wenn eine elektrische Spannung am Quarz angelegt wird.
Der inverser piezoelektrischer Effekt kann für verschiedene Aktoren benutzt werden.
Beispielsweise nutzen Piezopositionierer die sehr kleine Verformung um Gegenstände präzise zu positionieren, Piezolautsprecher erzeugen hochfrequente Schallwellen, wenn man entsprechend hochfrequente Wechselspannungen anlegt.
-> Elektrostriktion
-> Beschleunigungsaufnehmer, piezoelektrisch
Piezokeramik
Piezokeramik ist ein Material, das den piezoelektrischen Effekt aufweisst.
Zusätzlich generieren Piezokeramiken häufig auch Ladungen, wenn sich die Umgebungstemperatur ändert.
-> Beschleunigungsaufnehmer, piezoelektrisch
piezoresistiver Effekt
Der piezoresistive Effekt beschreibt die Änderung des spezifischen elektrischen Widerstandes eines Materials durch Dehnung. Die Widerstandsänderung resultiert dabei im Prinzip aus der Abstands- bzw. Positionsänderung der Atome des Materials.
Der piezoresistive Effekt kommt unter anderem bei Dehnungsmessstreifen (DMS) zum tragen.
-> Widerstand, elektrischer
Polarisation
Die Polarisation gibt an, wie sich der Wellenvektor einer Welle (z.Bsp. einer Lichtwelle) relativ zum Feldvektor verhält.
- lineare Polarisation: Der Feldvektor zeigt stets in die selbe Richtung (bzw. exakt in die Gegenrichtung) und ändert seinen Betrag periodisch mit einer festen Amplitude.
Polynom
Ein Polynom ist eine Funktion P(x) mit:
| P(x) = | Σ | n | aixi | |
| i=1 |
--> Siehe auch Kurvenanpassung
potentiometrische Wegaufnehmer (resistive Wegaufnehmer)
- lineare Wegaufnehmer

Ein linearer Wegaufnehmer besteht aus einem langen Widerstandselement aus leitfähigem Kunststoff und einem Schleifer.
Der Schleifer bewegt sich entlang des Widerstandelements und greift einen variablen Teil des Widerstandes ab. Das Potentiometer muss als Spannungsteiler und nicht als Rheostat beschaltet werden. - Seilzugwegaufnehmer
Ein Seilzugwegaufnehmer besteht aus einem Seil, das auf eine gefederte Spule gewickelt ist. Die Spule ist an der Achse eines Dreh-Potentiometers montiert. Wird am Seil gezogen, so dreht sich die Spule und die Potentiometer-Achse. Auch hier ist die abgegriffene Spannung proportional zum Weg. Es gibt außerdem auch Seilzugwegaufnehmer, die neben dem Wegsignal auch ein zur Geschwindigkeit proportionales Signal zur Verfügung stellen.

proportionaler Übertragungsfaktor
-> Übertragungsbereich
Proportionalitätsgrenze
Bis zur Proportionalitätsgrenze steigt die Dehnung linear mit der Kraft.
Sie liegt unterhalb der Elastizitätsgrenze (Re).
-> Dehngrenze
-> Streckgrenze
-> Hookesches Gesetz
Prüfdruck
Der Prüfdruck ist der Druck, mit dem ein Druckaufnehmer zur Ermittlung bzw. Überprüfung des Berstdrucks belastet wird.
-> Druck
-> Überlastbarkeit
-> Überlastbarkeit ohne Zerstörung
-> Überlast-Erholzeit
-> Überlastung
PSI
Abkürzung für: Pounds per Square Inch
PSI ist die englische Einheit des Drucks.
1 PSI = 0,068046 bar
PTB - Die Physikalisch-Technische Bundesanstalt
Die Physikalisch-Technische Bundesanstalt (PTB), ist das nationale Metrologie-Institut mit wissenschaftlich-technischen Dienstleistungsaufgaben.
-> Homepage der PTB
-> DAkkS - Deutsche Akkreditierungstelle
-> Homepage der DAkkS
-> DKD - Neuer Deutscher Kalibrierdienst
-> DKD - Internetpräsenz
-> Kalibrierung
-> Gesamtgenauigkeit
-> Nichtlinearität
-> Kalibrierung bei 50% vom Nennbereich
-> Wiederholbarkeit
-> Hysterese
-> thermisches Verhalten
-> thermische Nullpunktverschiebung
-> thermische Sensitivitätsänderung
Quanten-Hall-Effekt
Bei starken Magnetfeldern und Temperaturen um einige Kelvin nimmt die Hall-Spannung nicht kontinuierlich mit dem fließenden Strom zu. Bildet man die Größe UH/I (UH: Hall-Spannung, I: Strom), so findet man, dass diese Größe diskret zu nimmt und zwar mit ganzzahligen Bruchteilen der von-Klitzing-Konstante.
-> elektrischer Widerstands Standard
Quantisierungsfehler
Dadurch, dass ein A/D-Wandler eine endliche Auflösung besitzt, können analoge Signale nicht beliebig genau digital dargestellt werden. Die Differenz zwischen tatsächlichem analogen Wert und digitalisiertem Wert wird als Quantisierungsfehler bezeichnet.
Quarz
Auf Grund des piezoelektrischen Effekts erzeugt ein Quarz bei Dehnung oder Stauchung eine zur angreifenden Kraft proportionale elektrische Spannung.
-> Beschleunigungsaufnehmer, piezoelektrisch
-> Druckaufnehmer, piezoelektrische
-> Kraftaufnehmer, piezoelektrisch
Quell-Impedanz
Die Quell-Impedanz ist der (scheinbare) elektrische Widerstand einer Signalquelle. Dieser setzt sich zusammen aus ohmschen, kapazitiven und induktiven Anteilen. Der nachfolgende Eingang der Signalverarbeitung muss an die Impedanz der Quelle angepasst sein, um Messfehler zu vermeiden.
-> Lastwiderstand
-> Ladungsverstärker
Querbeschleunigungsempfindlichkeit
Beschleunigungsaufnehmer besitzen neben der Empfindlichkeit für Beschleunigung, die in Richtung Ihrer Messachse auftritt, auch noch eine Empfindlichkeit Beschleunigung, die quer zu dieser Achse auftritt. Die Empfindlichkeit für diese Beschleunigung wird in % der Empfindlichkeit in Messrichtung angegeben und Querbeschleunigungsempfindlichkeit genannt.
Querkraftempfindlichkeit
Treten bei Kraftmessungen nicht nur Kräfte senkrecht zur Messachse auf, kann das Messergebnis verfälscht werden. Dieses Problem kann bei manchen Flachprofil - Kraftaufnehmern durch konstruktive Maßnahmen minimiert werden.
Die Querkraftempfindlichkeit eq kann als maximale Änderung der Empfindlichkeit in Prozent in Messrichtung angegeben werden, wenn 10% der Nennkraft senkrecht zur Messachse auf der Oberfläche des Sensors wirken.
10% der Nennkraft senkrecht zur Messachse werden erzeugt wenn:
-
Die gesamte Nennkraft (Full Scale) in einem Winkel von etwa 5,7°
zwischen eingeleiteter Kraft und Messachse angelegt wird
arcsin(0,1) = arcsin (10%) = ca. 5,7° - Die halbe Nennkraft in einem Winkel von ca. 11,5°
zwischen eingeleiteter Kraft und Messachse angelegt wird
arcsin(0,1/0,5) = ca. 11,5° - Ein Fünftel der Nennkraft in einem Winkel von 30°
zwischen eingeleiteter Kraft und Messachse angelegt wird
arcsin(0,1/0,2) = 30°
Die maximale Querkraft, die senkrecht zur Messachse auf die Oberfläche des Sensors eingeleitet werden darf, ohne dass er dauerhaft beschädigt wird, ist eine weitere wichtige Kenngröße.
=> Überlastbarkeit ohne Zerstörung.
Der entsprechender Winkel ergibt sich aus dem Verhältnis zwischen der maximalen Querkraft Ftmax und der Gesamtkraft F:
α = arcsin(Ftmax/F)
Beispiel: maximale Querkraft = hälfte der Nennkraft:
=> Der Sensor wird dauerhaft beschädigt, wenn die Nennkraft in einem Winkel von > 30° zwischen eingeleiteter Kraft und Messachse angelegt wird.
->Sensormontage, Kraftaufnehmer
Ratiometrischer Ausgang
Das Ausgangssignalverhalten von Sensoren, dessen Ausgangssignal linear von der Speisespannung abhängt, wie beispielsweise bei DMS-Sensoren, nennt man ratiometrisch.
Bei solchen Sensoren ist es üblich, die Sensitivität in mV/V anzugeben und nicht in mV/(zu messende Einheit).
Rauschen
Rauschen ist ein unregelmäßiges Störsignal dessen Frequenzspektrum unspezifisch ist. Der Rauschanteil eines Sensorsignals reduziert die Auflösung des Sensors.
Das Rauschen ist von der Bandbreite eines Sensors abhängig. Einen generellen Absolutwert für das Rauschen kann man also nur angeben, wenn die Bandbreite des Sensors feststeht.
Da Tiefpassfilter (Antialiasingeffekt), die die Bandbreite des Sensors begrenzen, oft eingesetzt werden, und somit das Signal- zu Rauschverhältnis beeinflussen, ist es sinnvoll ein generalisiertes Rauschen der Messgröße per Bandbreite (Bn) anzugeben.
RMS Rauschen = Xng/Wurzel(Hz) x Wurzel(Bn), wobei ng (nano-g´s) die physikalische Einheit ist,
Bn = B3 x pi/2 ~ B3 x 1,6 ist, und B3 die -3dB-Bandbreite ist.
Beispiel: Ein Beschleunigungsaufnehmer hat ein Rauschen pro Wurzel(Bn) von 30ng/Wurzel(Hz).
Ohne Tiefpassfilter hat er eine Bandbreite (-3db) von 1 kHz
=> rms Rauschen = 30ng/Wurzel(Hz) * Wurzel(1000Hz*1.6) = 1,2 mg
Mit einem Tiefpassfilter der Bandbreite (-3dB) von 10 Hz erhält man:
=> rms Rauschen = 30ng/Wurzel(Hz) * Wurzel(10Hz*1.6) = 120 ng
-> Filter
Reproduzierbarkeit
Reproduzierbarkeit ist dann gegeben, wenn ein Messwertaufnehmer stets bei einer bestimmten anliegenden Eingangsgröße (und gleichbleibenden Umgebungsbedingungen) dasselbe Ausgangssignal erzeugt.
Relativdruck
Der Relativdruck ist der relativ zum Umgebungsdruck gemessene Druck.
-> Druck
-> Absolutdruck
-> Gekapselte Druckausführung
Resonanzfrequenz
Die Resonanzfrequenz ist die Frequenz, mit der eine mechanische Struktur oder ein elektrischer Schwingkreis nach einmaliger, impulsförmiger Anregung schwingt.
Wird mit der Resonanfrequenz angeregt, kann es bei mechanischen Strukturen (abhängig von deren Dämpfung) zu Zerstörung kommen.
Diese Tatsache begrenzt den Frequenzbereich, in dem ein Sensor eingesetzt werden kann (Bandbreite) auf 30% seiner Resonanzfrequenz.
Für die Resonanzfrequenz eines Kraftaufnehmers gilt:
f= 1 / (2 · PI) · Sqrt(k / M), wobei
k = Steifigkeit
M = bewegte Masse, also die Masse eines Kraftaufnehmers, die sich bei einer Krafteinleitung bewegt
-> Eigenmasse
-> Kennlinie
Rheostat
Ein Rheostat ist ein veränderlicher Widerstand. Bei Nutzung eines Sensors als Rehostat ist zu beachten, dass bei niedrigen Widerstäden hohe Ströme fließen können. Der Ohmsche Rechner kann benutzt werden, um den Strom und die Leisung zu ermitteln.
So fließt bei einer Konstantspanngunsversorgung von 10 V und einem Widerstand von 1 OHM, ein Strom von 10 A durch die Leitung. Das entspricht einer Leistung von 100 Watt! Dies könnte das Messgerät zerstören! Es ist also darauf zu achten, dass ein weiterer Widerstand in Serie eingebaut wird, um den maximale Strom/Leistung zu begrenzen.
-> potentiometrischer Wegaufnehmer
-> Spannungsteiler
Riss-Erkennung
Mit Hilfe von Beschleunigungsaufnehmern und geeigneten Auswerteverfahren lassen sich Risse in mechanischen Strukturen detektieren.
-> Impulshammer
-> Materialprüfung
-> Modalanalyse
-> Strukturanalyse
RS-232
RS-232 ist die Bezeichnung für einen Standard der seriellen Schnittstelle. Er definiert die digitale Datenübertragung mit max. 9200 Bit/s über relativ kurze Entfernungen.
RS-422
RS-422 ist die Bezeichnung für einen Standard der seriellen Schnittstelle. Er definiert die Datenübertragung mit max. 2 MBit/s über Entfernungen bis max. 1,2km.
RTD
Abkürzung für: Resistive Temperature Device
Ein RTD ist ein Temperatursensor aus Metall (Nickel, Platin und einige Kupferligierungen), dessen Widerstand mit der Temperatur steigt.
Mit RTD's können Temperaturen von -268 °C bis ca. 1000 °C gemessen werden.
Am häufigsten wird Platin wegen seiner guten Linearität eingesetzt.
Der PT 100 besitzt beispielsweise einen Widerstand von 100 Ohm bei 0 °C.
-> Thermistor
-> Thermoelement
SanShiftTM
SanShiftTM ist eine von der Firma FGP entwickelte Technologie, die die Nullpunktverschiebung, die während der Montage durch das Anzugsdrehmoment entsteht, minimiert.
Schiffsbewegungen
- Gieren:
- Bewegung um die Hochachse, Yaw
- Wanken:
- Bewegung um die Längsachse, Roll
- Nicken:
- Bewegung um die Querachse, Pitch
- Tauchen:
- Bewegung entlang der Hochachse, Heave
- Wogen:
- Bewegung entlang der Längsachse, Surge
- Schwoien:
- Bewegung entlang der Querachse, Sway
-> Beschleunigungsaufnehmer
Schock
Ein Schock ist eine große, kurzzeitig auftretende Beschleunigung.
Schockaufnehmer
Ein Schockaufnehmer ist ein Beschleunigungsaufnehmer zur Messung eines Schocks.
Er zeichnet sich aus durch geringe Empfindlichkeit, großem Messbereich und hoher Grenzfrequenz.
Schraubbefestigung
Als Schraubbefestigung wird die Befestigung eines Beschleunigungsaufnehmers am Messobjekt mittels Gewindebohrungen und Schrauben bezeichnet.
Schütteltisch
-> Shaker
Schwinggeschwindigkeit
Die Schwinggeschwindigkeit ist die momentane Geschwindigkeit, mit der sich eine schwingende mechanische Struktur bewegt.
Sie kann mathematisch als Integral über das Beschleunigungssignal berechnet werden.
Elektronisch lässt sich dies erreichen, indem man das Beschleunigungssignal tiefpassfiltert (mit -6dB/Oktave).
Schwingung
Schwingungen sind Vorgänge, bei denen sich ein physikalischer Zustand zeitlich periodisch verändert.
-> harmonische Schwingung
-> kritische Dämpfung
-> aperiodischer Grenzfall
-> Schwinggeschwindigkeit
Schwingung, klassifizierung

deterministisch: Von der Zeit eindeutig und reproduzierbare Signalverläufe, die mathematisch beschreibbar sind.
periodisch: Signalverläufe, die sich periodisch wiederholen.
aperiodisch: Signalverläufe, die sich nicht periodisch wiederholen.
harmonisch: sinusförmige Signalverläufe.
komplex harmonisch: Signalverläufe die periodisch sind und sich durch Fourierreihen darstellen lassen.
oszillierend (fast-periodisch): Überlagerungen von harmonischen Signalverläufe die keinen kausalen Zusammenhang haben.
transient (relaxierend): diskrete Signalverläufe, die nach eine Zeit abklingen (z.B. Hammerpulse).
stochastisch: Zufällige Signalverläufe, die nur statistisch beschreibar sind (Mittelwerte, Verteilungsdichte p(x)).
stationär: Signalverläufe, deren statistischen Kenngrößen sich mit der Zeit nicht ändern.
ergodisch: Signalverläufe, deren statistischen Kenngrößen aus einer zeitlichen Mittelung die gleichen sind wie aus einer Mittelung mehrere Versuche.
nicht ergodisch: Signalverläufe, deren statistischen Kenngrößen sich für ein Versuch mit definiertem Dauer nicht ändern.
instationär: Signalverläufe, deren statistischen Kenngrößen sich mit der Zeit ändern.
Schwingungsanalyse
Eine Schwingungsanalyse wird zur Sicherstellung der Betriebsfestigkeit / des gewünschten Schwingverhaltens mechanischer Strukturen verwendet. Folgende Methoden stehen je nach Ausgangslage zur Wahl:
- Betriebsschwingformanalyse (ODS Operating Deflection Shapes Analysis) - Schwingungen eines realen Prüflings werden im Betrieb gemessen und dann visuell dargestellt ("PC-Stroboskop")
- analytische Modalanalyse (AMA, Analytic Modal Analysis) - Schwingungen eines dem realen Prüfling entsprechenden virtuellen Modells werden simuliert und analysiert
- experimentelle Modalanalyse (EMA, Experimental Modal Analysis) - Schwingungen eines realen Prüflings werden bei bekannter / definierter Anregung analysiert
- Modalanalyse aus Betriebsdaten (OMA, Operational Modal Analysis) - Schwingungen eines realen Prüflings werden im Betrieb, also bei NICHT bekannter Anregung analysiert
Schwingungsanalyse an rotierenden Systemen
Um Materialdefekte an Maschinen zu diagnostizieren, benutzt man meist die FFT-Analyse. Bei rotierenden Systeme, ist die FFT-Analyse zwar immer noch Grundlage der Untersuchung, aber alleine jedoch oft nicht ausreichend.
Da Probleme meist durch Fehler in Getrieben, Kugellagern (Kugeln, Lagerschale, Lagerkonus od. Lagerkäfig), durch Unwuchten, mangelnde Fluchtungen oder lose Passung verursacht werden, die in Abhängigkeit von der Drehzahl stehen, wird das Frequenzspektrum so umgerechnet, dass die Frequenz in ganzzahligen Vielfachen der aktuellen Drehzahl dargestellt wird. Dieses Verfahren nennt man Ordnungsanalyse.
Störungen, wie Risse im Kugellager oder abgebrochene Zähne im Getriebe, verursachen impulsartige Ereignisse.
Man würde erwarten, dass eine FFT-Analyse Peaks im Frequenzspektrum ergeben, die der Häufigkeit dieser Ereignisse entsprechen. Leider ergibt eine FFT über einen solchen hochenergetischen, kurzen Puls ergibt eine über fast alle Frequenzen 'verschmierte' Kurve, da Pulse in der Fourierdarstellung als eine Überlagerung von mehreren Sinusschwingungen sind.
Um diese Peaks sichtbar zu machen, verwendet man das Hüllkurven-Demodulationsverfahren
Generell kann man sagen, dass bei der Ordnungsanalyse auf Peaks geachtet wird, die bei Störungen von den erwarteten Peaks (Amplitude und Ordnung bzw. Frequenz) abweichen.
Schwingungsanalyse, Unwucht
Bei Unwuchten (ungleichmäßigen Gewichtsverteilungen) werden hohe Amplituden in der ersten Ordung erwartet. Die Unwuchtamplitude ist proportional zum Quadrat der Drehzahl. Weiterhin gibt es einen 90°-Phasenunterschied zwischen der horizontalen und der vertikalen Messung. Damit unterscheidet sich dieser Fall von der schlechten Fluchtung.
Schwingungsanalyse, schlechte Fluchtung
Bei mangelnder Fluchtung (z.B. benachbarte Antriebswellen sind nicht parallel) sind Amplituden in Vielfachen der ersten Ordnung erwartet. Hier beträgt der Phasenunterschied zwischen der Horizontalen und Vertikalen 180°, und unterscheidet sich damit von der Unwucht.
Schwingungsanalyse, lose Passung
Bei schlechter Passung werden Amplituden in Vielfachen der ersten Ordnung erwartet. Bei schlechter Passung, in der rotierende Elemente nicht fest miteinander verbunden sind sind Peaks bis zu 10. Ordnung betroffen. Manchmal sieht man auch subharmonische Vielfache der 1. Ordnung, also 1/2 oder 1/3 der 1. Ordnung.
Sind die Element nicht fest am Fundament verbunden, treten häufig Peaks in der 1. und 2. Ordnung auf.
Schwingungsanalyse, Antriebe
Bei Lagern, Propellern, Zahnrädern oder Riemenantriebe werden Peaks erwartet, die von der Anzahl der Kugeln, Blätter, Zähnezahlen, Riemenlängen und anderen antriebsartspezifischen Parametern abhängen. Es gibt Datenbanken, in denen beispielsweise diverse Lagertypen aufgelistet sind - mit der Anzahl der Kugeln und der verschiedenen Maße der Lagerteile. Aud diese Datenbanken greifen Softwareprogramme zu, und stellen erwarterte Peaks dar. Damit sind Abweichungen schnell erkennbar.
Im folgenden gehen wir stellvertretend auf zwei dieser Antriebsarten ein. Bei anderen ist die Vorgehensweise sehr ähnlich.
Schwingungsanalyse an Lagern
Das unten dargestellte Kugellagerschale ist beschädigt. Jedesmal wenn eine Kugel den Schaden passiert, erzeugt sie einen Störpuls, wobei jeder Puls sehr kurz und hochenergetisch ist.
Die Frequenz dieses immer wiederkehrenden Störpulses nennt man Kugel-Passierfrequenz (KPF).
Das Zeitsignal wird jetzt mit einem Hochpass-Filter gefiltert, um die niederfrequenten Komponenten herauszufiltern, damit nur die Zeitsignale übrig bleiben, die durch diese Störpulse erzeugt werden.
Wird nun eine FFT-Analyse durchgeführt, erhält man keine deutliche Spitze im Bereich der Kugel-Passierfrequenz, sondern ein "Frequenzband", auf Grund der Pulsform des Störsignals.
Um die tatsächliche Frequenz zu ermitteln, überlagert man daher das Zeitsignal mit einer Hüllkurve und führt dann eine FFT oder eine Ordnungsanalyse über diese Hüllkurve durch.
Dieses Verfahren wird Hüllkurven-Demodulation genannt.
Nun erhält man tatsächlich die Kugel-Passierfrequenz und die Frequenzen der dazugehörigen Oberschwingungen, bzw. bei der Ordnungsanalyse das Vielfache der aktuellen Drehzahl.
Unten ist eine Darstellung der Hüllkurven-Demodulation.
Im diesem Beispiel mit 6 Kugeln liegt die Kugel-Passierfrequenz 6 mal höher als die Umlaufrequenz. Die Oberschwingungen sind dann die ganzzahligen Vielfachen der Passierfrequenz.

Für diese Art der Lagerüberwachung gibt es spezielle piezoelektrische Beschleunigungsaufnehmer, die neben dem reinen Beschleunigungssignal auch das Hüllkurven-Signal zur Verfügung stellen ("Envelope-g").
Schwingungsanalyse an Riemenantriebe
Treibriemenbeschädigungen werden durch Risse, Fluchtprobleme, ungenügende Spannung, Verschleiß usw. verursacht.

Auch hier wird die Ordnungsanalyse verwendet, um solche Probleme rechtzeitig sichtbar zu machen.
die Primärriemenfrequenz ist die Häufigkeit mit der der Riemen um die Antriebsscheibe pro Sekunde umläüft.
Hier gilt:
Primärriemenfrequenz = π x Antriebsscheibendurchmesser x Antriebsscheibendrehzahl / Riemenlänge
Bei Zahnriemen treten auch weitere Resonanzen auf, wenn ein Zahn der Antriebsscheibe passiert. Hier gilt:
Zahnriemenfrequenz = Riemenfrequenz x Anzahl Zähne


Schwingungsaufnehmer
-> Beschleunigungsaufnehmer
-> Schwingungsmessung
Schwingungsmessung
Die Messung von Schwingungen kann mit Beschleunigungsaufnehmern oder mit Wegaufnehmern durchgeführt werden.
Schwingweg
Der Schwingweg ist die maximale Entfernung eines schwingenden Teils von seiner Ruhelage.
Mathematisch kann er durch zweifache Integration aus dem Beschleunigungssignal berechnet werden.
Elektronisch erhält man den Schwingweg auch durch Tiefpassfilterung (-12dB/Oktave) des Beschleunigungssignals.
Seismik-Aufnehmer
Ein Seismik-Aufnehmer ist ein Beschleunigungsaufnehmer, der sich durch kleinen Messbereich und hohe Auflösung auszeichnet. Er wird eingesetzt, um Schwingungen an Bauwerken zu messen.
Sensitivität, Empfindlichkeit, Kennlinie
Die Sensitivität, Empfindlichkeit oder Kennlinie eines Messwertaufnehmers ist definiert als Quotient des Ausgangssignals und der Speisespannung oder physikalischen Eingangsgröße.
z.B. mV/V, mV/bar, mV/g (siehe Bemerkungen zur Definitonstandards:).
Sie beschreibt den Zusammenhang zwischen zu messender Größe (x) und dem resultierenden elektrischen Ausgangssignal (y) des Sensors. Im Idealfall ist der Zusammenhang nahezu linear und kann mit dem Verfahren BSL bzw. BSLTZ durch eine Gerade beschrieben werden:
y = m·x + c
m: Empfindlichkeit
c: Nullpunkt-Offset
x: zu messende Größe
y: elektrisches Ausgangssignal

Die Empfindlichkeit ist also die Steigung der Geradengleichung und ist unabhängig vom Nullpunkt Offset.
Der Nullpunkt-Offset hat nichts mit dem Zusammenhang zwischen Messgröße und Ausgangssignal zu tun. Er verschiebt die Steigungsgerade nur entlang der Y-Achse. Signalverarbeitende Geräte haben meistens die Möglichkeit diese Verschiebung auf Null zu setzen, so dass die Gerade dann den Nullpunkt durchkreuzt. Diese Funktionalität nennt mann Tarieren
Einige signalverarbeitende Geräte (z.B. Digitalanzeigen) benötigen die Eingabe der Steigung mit zwei Wertepaaren (Eingang1,Anzeigewert1) ; (Eingang2,Anzeigewert2).
Das erste Wertepaar kann ermittelt werden, in dem von einer Geraden ausgegangen wird, die durch den Nullpunkt geht.
=> Erstes Wertepaar = (0mV,0N)
Für das zweite Wertepaar wird die Ausgangsspannung bei Volllast eingesetzt. Für einen DMS-Kraftaufnehmer mit einem Messbereich von 50N und einer Sensitivität von 12.34 mV/V, der mit 10 V gespeist wird ergibt sich:
Signal bei Volllast (50N) ist 12.34mV/V x 10V = 123.4 mV
=> zweites Wertepaar = (123.4mV,50N)
Wir erhalten eine Gerade, die durch den Nullpunkt geht.
Die Steigung (Empfindlichkeit) ist 123.4mV/50N = 2,468mV/N

Falls der Kraftaufnehmer im unbelasteten Zustand einen Nullpunkt-Offset von -0,5 mV hat, bedeutet dies, dass die Gerade um 0,5mV nach unten verschoben wird.
Wird der Kraftaufnehmer nun montiert, kann sich der Nullpunkt-Offset (beispielsweise wegen einer Vorlast) ändern. Ist der Nullpunkt-Offset jetzt beispielsweise +1mV bedeutet dies nun eine entsprechende Verschiebung der Gerade nach oben.
Da der Nullpunkt also anwendungsbedingt unterschiedlich seien kann, wird er oft nicht im Kalibrierdatenblatt angegeben. Auch die Vorlast im unbelasteten Zustand während der Kalibrierung beim Hersteller kann sich von der Vorlast im Betrieb beim Kunden unterscheiden. So kann zum Beispiel ein DMS-Kraftaufnehmer im unbelasteten Zustand während der Kalibrierung aufrecht stehen und im Betrieb liegen.
Bemerkungen zur Definitonstandards:
-
Es gibt viele Möglichkeiten Sensitivität zu definieren:
Üblicher weise gibt man die Sensitivität in mV/(zu messende Einheit) an.
In unserem Beispiel wäre dies 2,468 mV/N
Bei Sensoren mit ratiometrischem Ausgang gibt man die Sensitivität meistens in mV/V an.
In unserem Beispiel wäre dies 1,234 mV/V
Auch eine Kombination von beiden wird manchmal angegeben, also mV/V/N
In unserem Beispiel wäre dies 0,247 mV/V/N -
Kraftaufnehmer können in Zug- und Druckrichtung eingesetzt werden.
Es hat sich durchgesetzt, dass die Steigung in Zugrichtung positiv und in Druckrichtung negativ ist.
-
Die Sensitivität wird auch Empfindlichkeit oder Kennlinie genannt.
In diesem Kompendium benutzen wir folgende Definitionen:
Eine Angabe in mV/(zu messende Einheit) nennen wir Empfindlichkeit.
Eine Angabe in mV/V nennen wir Sensitivität.
Eine Angabe in mV/V/N nennen wir die Kennlinie des Sensors.
-> Beispiel (Beschleunigungs- und Neigungssensoren
-> Empfindlichkeit
-> Fehler
-> Kennlinie
-> Nichtlinearität
-> thermische Sensitivitätsänderung
-> Übertragungsfaktor
Sensor
Ein Sensor ist ein Gerät, das mechanische, physikalische oder chemische Größen in ein Signal (meistens ein elektrisches Signal) umwandelt. Er bildet die Basis eines Messwertaufnehmers. Er ist das Gegenteil eines Aktors.
-> Sensoren-Webseite
Sensor-Array
Um eine höhere Empfindlichkeit zu erhalten, werden mehrere Sensoren zu einem Sensor-Array zusammengefasst.
Sensormontage
Unter der Sensormontage versteht man im Allgemeinen die Anbringung des Sensors an seinem Einsatzort. Abhängig von der zu messenden Größe und des Sensortyps müssen dabei verschiedene Sachverhalte berücksichtigt werden.
-> "Leitfaden zu Anschluß und Montage von DMS-Aufnehmern"
-> Sensormontage, Beschleunigungsaufnehmer
-> Sensormontage, Beschleunigungsaufnehmer mit Gewinde
-> Sensormontage, Beschleunigungsaufnehmer mit Klebefläche
-> Sensormontage, Druckaufnehmer
-> Sensormontage, Kraftaufnehmer
-> Sensormontage, S-Profil-Kraftaufnehmer
-> Sensormontage, Flachprofil-Kraftaufnehmer
-> Sensormontage, Unterlegscheibenkraftaufnehmer
Sensormontage, Adapter
Oft besitzen Sensoren nicht den mechanischen Anschluss, der für die Anwendung vorgesehen ist, beispielsweise wegen der Verwendung von metrischen Gewinden
in Europa und imperialen Gewinden in den USA.



Weitere Adapter werden verwendet, um Sensoren die eine Gewindebefestigung haben auf ebene Flächen zu montieren. Hierzu werden Klebe- oder Magnetadapter verwendet.
Bei der Verwendung von Adaptern ist darauf zu achten, dass die Verbindung starr und fest ist, um Verfälschungen in der Messung zu vermeiden. Eine zusätzliche Verklebung ist oft sinnvoll. Lose Verbindungen verursachen zusätzliche Dehnungen, Eigenresonanzen und Querkräfte, die nicht nur die Messung deutlich verfälschen, sondern auch die Sensoren beschädigen können. Vibrationen können zudem die Verbindung weiter lockern.
Aber auch eine zu feste Verbindung kann den Sensor beschädigen. Hierbei sollte beispielsweise auf das im Datenblatt des Sensors angegebene maximale Drehmoment geachtet werden.
-> Sensormontage, Beschleunigungsaufnehmer
-> Sensormontage, Beschleunigungsaufnehmer mit Gewinde
-> Sensormontage, Beschleunigungsaufnehmer mit Klebefläche
-> Sensormontage, Druckaufnehmer
-> Sensormontage, Kraftaufnehmer
-> Sensormontage, S-Profil-Kraftaufnehmer
-> Sensormontage, Flachprofil-Kraftaufnehmer
-> Sensormontage, Unterlegscheibenkraftaufnehmer
Sensormontage, Beschleunigungsaufnehmer
Prinzipiell gibt es mehrere veschiedene Möglichkeiten zur Befestigung von Beschleunigungsaufnehmern. Deren Vor- und Nachteile sind je nach Messaufgabe abzuwägen.
Steht die schnelle Montage und einfache Wiederentfernbarkeit des Beschleunigungsaufnehmers im Vordergrund empfiehlt sich die Montage mit Wachs oder die Magnetbefestigung.
Dauerhafter dagegen ist die Montage durch Verschraubung oder Verklebung des Sensors mit dem Untergrund, wodurch optimaler Kontakt mit dem Untergrund gewährleistet ist.
Ein wichtiges Kriterium für die Auswahl der Befestigungsart ist der Frequenzbereich, in dem die Messung stattfinden soll. Eine Auswahlhilfe bietet die nachfolgende Grafik:

Kabelverlegung:
Bei der Montage des Sensors sollte auch das Kabel so verlegt werden, dass es sich möglichst wenig bewegt.
Damit werden überlagerte Schwingungen auf Grund der Kabelbewegung vermieden.
Bei Sensoren mit Ladungsausgang wird triboelektrisches Rauschen (Ladungen die durch das Bewegen der Kabel erzeugt werden) minimiert.

-> Sensormontage, Beschleunigungsaufnehmer mit Klebe-Montagesockel
-> Sensormontage, Beschleunigungsaufnehmer mit Gewinde-Montagesockel
Sensormontage, Beschleunigungsaufnehmer mit Klebe-Montagesockel
Besitzt ein Beschleunigungsaufnehmer einen Montagesockel (Grundplatte) mit Klebefläche, so nutzt man diese Fläche, um ihn mit Wachs oder Klebstoff am Prüfling zu befestigen.

Der Montagesockel ist starr mit dem piezoelektrischen Kristall samt seismischer Masse verbunden und gewährleistet eine optimale Schwingungsübertragung.
Besonders bei würfelförmige Sensoren ist darauf zu achten dass die Montagesockelfläche und nicht eine Seitenfläche für die Verklebung genutzt wird, auch wenn die Montage dadurch wegen der Kabelführung einfacher ist. Eine solche Befestigung würde die Übertragung des Frequenzgangs und die Amplitude deutlich verfälschen, da das Gehäuse nur eine 'Abdeckung' ist, die nicht optimal mit dem Piezokristall verbunden ist.
Die Befestigung eines Beschleunigungsaufnehmers mit Wachs ist angebracht, wenn die schnelle Montage und einfache Wiederentfernbarkeit unter normalen Laborbedingungen (bei Raumtemperatur) im Vordergrund steht.
Dabei sollte nur sehr wenig Wachs verwendet werden um eine optimale Verbindung zu erzielen.
Hier ist aber zu beachten, dass Wachs bei erhöhter Temperatur schmilzt und daher ungeeignet ist.
Steht dagegen der optimale Kontakt mit dem Untergrund und somit eine optimale Schwingungsübertragung eher im Vordergrund als die einfache Handhabung, dann ist die Montage durch Verklebung vorzuziehen.
Als Klebstoff werden Zwei-Komponenten-Methyl-Methacrylate, -Epoxidharze oder - immer mehr - Sekundenkleber (Cyanoacrylate) verwendet.
Sekundenkleber sind Ein-Komponentenkleber, die sehr praktisch in der Handhabung sind.
Vorteile:
- sie kleben sehr schnell
- sie besitzen eine hohe Zugfestigkeit
- sie sind trozdem leicht demontierbar (besitzen eine niedrige Scherfestigkeit und sind durch Aceton lösbar)
- einige Sekundenkleber halten bis zu 120°C
- außenbereichgeeignet
- nur ein Komponent (auf Mischungsverhältnis muss nicht geachtet werden)
Nachteile:
- sie kleben zu schnell
- Haut und Augen können auch verkleben
- sie sind durch Aceton lösbar
- sie besitzen eine niedrige Scherfestigkeit
Sekundenkleber sind bei Raumtemperatur flüssige chemische Verbindungen (Monomere bzw. kurze Alkyl-Ketten).
Werden sie Feuchtigkeit ausgesetzt (normale Luftfeuchtigkeit reicht aus) werden lange Molekül-Ketten gebildet (Polymerisation).
Die langen Ketten bilden sich zwischen beiden Klebeflächen.
Diese langen Ketten haften sehr gut daran und sind auch nicht mehr durch Wasser zerstörbar - also wasserfest.
Sensordemontage, geklebte Beschleunigungsaufnehmer
Die lange Ketten des Sekundenklebers brechen bei hohen Temperaturen, unter Einfluss von Lösungsmittel wie Aceton, sowie durch Scherkräfte.
Will man die Verbindung lösen, so ist dies daher möglich ohne den Sensor zu schädigen:
Man bringt Aceton seitlich an der Verbindungsstelle auf. Nach einigen Minuten lässt die Klebekraft nach.
Jetzt löst man den Sensor durch ein Demontagewerkzeug, das eine seitliche Kraft auf den Sensor ausübt ("abdrehen").

Methyl-Methacrylat-Kleber
Methyl-Methacrylate sind Zweikomponenten-Kleber. Sie härten auch relativ schnell zu Thermoplasten aus, brauchen jedoch länger als Sekundenkleber (5 Minuten bis 1 Stunde).
Vorteile:
- relativ kurze Klebezeiten
- auch für poröse Unterlagen geeignet
- zum Teil auch bei sehr tiefen (kryogenen) Temperaturen einsetzbar
- bis +180° einsetzbar
- hohe Festigkeit (bis 25 N/mm²)
- hohe Elastizitäten (bis zu 120%).
- außenbereichgeeignet
- Mischungverhältnis der Komponenten nicht so kritisch
- nur mechanisch entfernbar
Nachteile:
- starker Geruch
- kann beim Härten schrumpfen (<10%)
- Klebeflächen dürfen nicht wieder geöffnet werden (Härtungsprozess wird durch Sauerstoff gehemmt)
- entzündlich
- exotherm (beim Härten entstehen Temperaturen bis 120°)
- der 'Starter' (s.u.) ist ein Oxidationsmittel
- nur mechanisch entfernbar
Auch hier findet eine Polymerisation statt, aber hier werden zusätzlich zum Basis-Monomer (kurze Ketten), ein 'Starter' (ein reaktives Radikal, z.B. Peroxid) und ein Beschleuniger benötigt.
Es gibt zwei Möglichkeiten für diese drei Bestandteile (Basis-Monomer, Starter, Beschleuniger):
-
Das Basis-Monomer und das reaktive Radikal werden als eine Komponente und der Beschleuniger als zweite Komponte verwendet.
Die Mischung des Monomers und Radikals wird auf eine Klebefläche, und der Beschleuniger auf die andere Klebefläche angebracht. Die Polymerisation findet erst statt, nach dem die Klebeflächen zusammenkommen.
Dadurch entfällt die Zeit, die zum Kleben verfügbar ist, nachdem die Komponenten zusammen kommen (Topfzeit). -
Das Basis-Monomer und der Beschleuniger werden als eine Komponente und der Starter als zweite Komponte verwendet.
Um eine homogene Klebereaktion zu starten, müssen diese Komponenten vor dem Zusammenführen der Klebeflächen erst vermischt werden. Hierdurch verzögert sich das Aushärten um die Topfzeit
Epoxidharz-Klebstoffe bestehen aus Epoxidharz und Härter. Epoxidharze sind Polymerbausteine, die nach der Zugabe von Härter Kunststoffe bilden, die nicht mehr verformt werden können (Duromere, Duroplaste).
Höhere Festigkeiten werden erreicht, wenn bei höheren Temperaturen ausgehärtet wird. Es gibt auch besondere Ein-Komponenten Epoxidharz-Klebstoffe, bei denen Harz und Härter schon vermischt sind, aber nur bei sehr hohe Temperaturen reagieren, sodass diese nur bei hohen Temperaturen ausgehärtet werden können.
Vorteile von Zwei-Komponenten Epoxidharz-Klebstoffen:
- hohe festigkeit
- höhere Ermüdungsfestigkeit als Punktschweißen
- ersetzt Punktschweißen, wenn die Beschaffenheit des Stahls (Gefügeaufbau) es nicht zuläßt
- nur mechanisch entfernbar
Nachteile:
- lange Aushärtezeiten
- Mischungsverhältnis muss genau eingehalten werden
- nur mechanisch entfernbar
- allergen
- karzinogen (krebsfördend)
- Spröde nach dem Aushärten
Sensormontage, Beschleunigungsaufnehmer mit Gewinde-Montagesockel
Besitzt ein Beschleunigungsaufnehmer ein Gewinde, so kann er direkt mit dem Messobjekt verschraubt werden.

Folgende Punkte zeigen am Beispiel der Montage eines Beschleunigungsaufnehmers mit Gewindebohrung mittels eines M8 Bolzenadapters, was bei der Montage beachtet werden sollte:
- Der Montageort sollte so nahe wie möglich an der Vibrationsquelle liegen.
- Es wird eine flache, ebene, unlackierte Oberfläche mit ausreichendem Durchmesser benötigt. Falls diese nicht zur Verfügung steht, sollte die Oberfläche mit einem geeigneten Plansenker bearbeitet werden.
- Ein Loch mit 6,8mm Durchmesser und einer Tiefe von 10mm sollte in der Mitte einer ebenen Fläche gebohrt werden.
- Mit einem M8 Gewindeschneider sollte ein Gewinde bis zu einer Tiefe von 7mm geschnitten werden.
- Das M8 Gewinde sollte entgratet und die Oberfläche sowie das Gewinde des Bolzens mit einem Lösungsmittel gründlich gesäubert werden.
- Das M8 Gewinde des Bolzenadapters mit Schraubensicherungmittel versehen um ein Lösen der Schraubenverbindung zu verhindern
- Den Bolzenadapter in die bearbeitete Gewindebohrung einschrauben und mit einem geeigneten Drehmoment anziehen (Richtwert: 10Nm).
- Bevor der Beschleunigungsaufnehmer an dem Bolzenadapter montiert wird, sollte man Schmierfett an die gegenüberliegenden Kontaktflächen anbringen, um eine gute Schwingungskopplung zu gewährleisten.
- Den Beschleunigungsaufnehmer an den Bolzen anschrauben, dabei auf die Dehnungsempfindlichkeit des Sensors Rücksicht nehmen.
Richtwert: maximal 8Nm. - Als letztes sollte die Bewegung des Kabels minimiert werden - und damit die Beeinflussung der Schwingung durch überlagerte Kabelschwingung und triboelektrisches Rauschen). Dazu:
- falls möglich das Kabel am Sensorkörper befestigen - hierfür eine Schlaufe mit dem Anschlusskabel legen und mit Kabelbinder (oder bei kleinen Sensoren mit einem O-Ring) am Sensor befestigen
- im weiteren Verlauf das Kabel auf der Oberfläche des Prüflings befestigen, falls möglich.

Sensormontage, frontbündiger Druckaufnehmer
Druckaufnehmer mit frontbündigen Membranen messen direkt am Ort des Geschehens.
Sie haben kein Tot-Volumen und eine hohe Bandbreite.
Diese Vorteile sind darin begründet, dass die DMS bzw. Halbleiter-DMS direkt auf die Membran geklebt werden.
Diese exponierte Lage der Membran führt zunächst dazu, dass sie nicht nur auf Druck, sondern auch auf mechanische Belastungen sehr empfindlich reagiert.
Diese Belastungen führen zu einer Signalverfälschung.
Wie bei allen DMS-Sensoren, sollte der Sensor während der Montage angeschlossen sein. Ändert sich dabei der Offset deutlich außerhalb der Spezifikationen, kann davon ausgegangen werden, dass eine Signalverfälschung vorliegt.
Bei der Montage sollte gewährleistet sein, dass die Membran den Behälter nicht berührt. Eine Berührung führt zu einer vom Medien-Druck unahbängigen Deformation der Membran.
Es ist auf genug Spielraum zwischen Membran und Behälter zu achten, da Sensorgewinde und Gewindebohrung am Behälter nicht immer exakt parallel verlaufen.
Bei der Dimensionierung der Aussparung des Behälters für den Sensor sollte auf diese und andere mechanische Toleranzen Rücksicht genommen werden.
Wird bei einer Schräglage des Sensors nach einer Berührung trotz Verkantens weiter eingeschraubt, kann diese hohe mechanische Belastung zu einer dauerhaften Deformation der Membran und somit zu einer Zerstörung des Sensors führen.

Bei der Montage von frontbündigen Druckaufnehmern mit Gewinde ist darauf zu achten, dass das im Datenblatt angegebene maximale Anzugsdrehmoment nicht überschritten wird. Nur so kann die Einhaltung der im Kalibrierzertifikat spezifierten Werte gewährleistet werden.
Frontbündige Druckaufnehmer, die mit der SanShiftTM-Technologie ausgestattet sind, sind deutlich unempfindlicher gegenüber Anzugsdrehmomenten. Daher weisen sie bei vergleichbaren Anzugsdrehmomenten eine deutliche geringere Offsetverschiebung auf.
Um frontbündige Druckaufnehmer abzudichten werden 'O'-Ringe bzw. selbstzentrierende Dichtringe verwendet.
Die Montage von frontbündigen Druckaufnehmern ohne Gewinde ist etwas aufwendiger:
Dies ist ein Beispiel in der verschiedene Dichtungsmassen Anwendung finden.
Bei den beiden Anwendungen links wird im oberen Bereich ein RTV-Silikonelastomer verwendet, um die Beweglickeit der
Membran des frontbündigen Druckaufnehmers zu gewährleisten.
Im unteren Bereich wird ein Epoxidharz verwendet, damit eine Abdichtung von hoher Festigkeit entsteht.
Montage, Flachform-Druckaufnehmer
Flachform Druckaufnehmer können bei geeignete Montage Wasserdicht (IP68) montiert werden. Der Sensor wird in eine Vertiefung eingesetzt und mit Hartkleber befestigt, so dass nur die Edelstahloberfläche des Sensors sichtbar ist (s. Abb.).

Der Druckaufnehmer wird dann mit Epoxy abgedichtet, wobei der kreisförmige sensitive Bereich frei bleibt. Dadurch kann eine Wasserdichtigkeit von bis zu IP68 erreicht werden.
Sensormontage, Kraftaufnehmer
Es ist wichtig, bei der Krafteinleitung auf Kraftaufnehmer die Kräfte zentrisch einzuleiten, ansonsten entstehen Drehmomente, die das Messergebniss verfälschen können.
->Querkraftempfindlichkeit
Dieser Effekt wird zwar durch konstruktive Maßnahmen weitgehend minimiert, dennoch ist beim Betrieb von Kraftaufnehmern auf zentrische Krafteinleitung zu achten:

Es ist of sinnvoll die Montage in Zugrichtung vorzunehmen. Hier ein Beispiel:

Sensormontage, S-Profil-Kraftaufnehmer
Bei S-Profil-Kraftaufnehmern ist es wichtig darauf zu achten, in welcher Lage sie montiert werden:

Bei der richigen Montage ist das Kabel über den festen Teil des Sensors mit dem Boden fest verankert. Eine Bewegung des Kabels verursacht keine Bewegung des Sensors und anders herum.
Wird der Sensor falsch herum montiert, dann verursacht eine Bewegung des Kabels eine Bewegung des Sensors und anders herum. Eine Bewegung des Kabels verbiegt den Sensor am sensitiven Bereich, und das Gewicht des Kabels beeinflusst auch die Bewegung des Sensors. Dies führt zu einer Veränderung des Nullpunktes und der Empfindlichkeit des Sensors, sowie zu einer deutlichen Verschlechterung der Linearität des Sensors.
Sensormontage, Flachprofil - Kraftaufnehmer
Bei Kraftmessungen mit hoher Genauigkeit muss der äußere Kraftmessring von Flachprofil - Kraftaufnehmern auf einer Unterlage mit weniger als 5 µm Mittelrauhwert aufliegen. Hierzu gibt es spezielle Sockel, die dies auch bei weniger genau gefertigten Aufnehmern garantieren.
Sensormontage, Unterlegscheiben - Kraftaufnehmer
Bei Unterlegscheibenkraftaufnehmer ist es sinnvoll, zusätzliche Unterlegscheiben auf beiden Seiten anzubrignen, um eine gleichmäßige Krafteinleitung zu gewährleisten:
-> Flachprofilaufnehmer
Shaker (Schwingerreger)
Shaker sind Schwingerreger, die zur Strukturanalyse und Umweltsimulation sowie zur Überprüfung und Kalibrierung von Beschleunigungsaufnehmern eingesetzt werden.
elektrodynamische Shaker
Meistens werden elektrodynamische Shaker eingesetzt, die ähnlich einem Lautsprecher funktionieren.
Hierbei wird ein Schwingtisch mit einem Zylinder starr verbunden, der mit einer Spule umwickelt ist.
Dieser Zylinder wird in einen Permanentmagneten mit einem zylinderförmigen Luftspalt eingetaucht.
Fließt nun ein Wechselstrom i(t) durch die Spule, wirkt durch das vom Permanentmagneten erzeugte magnetische Gleichfeld der Flussdichte B eine dem Wechselstrom proportionale Kraft FLorentz (Lorentz-Kraft) auf den Schwingtisch.
Für den Betrag der Lorentzkraft gilt:
FLorentz = n · i(t) · l · B, wobei
F = Nennkraft des Shakers
B = magnetische Flußdichte des Permanentmagneten
i(t) = elektrische Stromstärke (Wechselstrom)
n= Anzahl der Spulenwicklungen
l= Leiterlänge
Es gilt auch:
F= m · a m = Gesamtmasse des Schwingers inkl. Prüfling a= Beschleunigung des Prüflings
Wie beim Lautsprecher auch, wird ein Leistungsverstärker benötigt um eine ausreichende Schwingamplitude zu erzeugen. Der Tonquelle beim Lautsprecher entspricht hier ein Frequenzgenerator.
Der Frequenzgang des Schwingerregers ist wegen der Resonanzen auf Grund des Aufbaus des Schwingerregers und der Prüflinge nicht flach. Der Verstärer versucht die Resonanzerhöhungen zu kompensieren (vergleichbar mit einem Equalizer in der Tontechnik), so dass die Amplitude der resultierende Beschleunigung im verwendeten Frequenzbereich unverändert bleibt.
Back-To-Back-Kalibrierung
Für die Kalibrierung eines Prüflings wird zwischen Prüfling und Schwingtisch als Vergleichsnormal ein hochpräziser piezoelektrischer Sensor in "Back-to back" Bauform eingesetzt. Da der Prüfling 'Huckepack' auf den Kalibriersensor starr verschraubt wird, kann das Schwingverhalten des Prüflings mit dem des Vergleichsnormals verglichen werden.
Piezoelektrische Shaker
Piezoelektrische Shaker nutzen Piezo-Stapelaktoren (Piezo-Stacks), also gestapelte piezokeramische Scheiben, deren Höhe sich mit angelegter elektrischer Spannung ändert.
Die Spannung bestimmt die Amplitude und der Strom die Geschwindigkeit der Schwingung.
Unten wird der Piezostapel starr mit einer besonders schweren seismischen Masse verbunden, und oben mit einer leichten Schwingtischplatte. Dadurch wird die Schwingung des Piezo-Stapelaktors fast vollstandig auf die Platte ubertragen:

Es gilt:
Beschleunigung a = dl · (2·Pi·f)2
wobei
dl = Auslenkung
f=Shaker-Frequenz
und
F = m· a
Wobei
m = Masse des Prüflings
F = Kraft auf dem Prüfling
Diese Art Schwingerreger werden für hochfrequente Prüfungen eingesetzt und können bei kleinen Amplituden hohe Kräfte bei hohen Frequenzen erzeugen. Sie bauen auch deutlich kleiner als elektrodynamische Shaker. Der Nachteil liegt in der hohen Leistung die für die Anregung benötigt wird.
Vergleich piezoelektrischer und elektrodynamischer Shaker
Shock exciter, Stoßerreger
Stoßerreger funktionieren genau so wie elektrodynamische Shaker bzw. piezoelektrische Shaker wobei als Signalquelle ein Impuls benutzt wird.
Piezoelektrische Stoßerreger können auch vorgespannt werden, um dann beim Entspannen einen Stoß auszulösen.

Bild eines piezoelektrischen Stoßerregers als Stoßquelle für einen Hopkinsonstab
Shunt-Widerstand
Der Shunt-Widerstand wird parallel zu einem Arm der Messbrücke eines DMS-Sensors geschaltet und erzeugt eine Verstimmung Ua der Brücke.

Allgemein gilt für die wheatstonesche Brücke:
Ua / Ue = ( R2 · R4 - R3 · R1 ) / ( ( R1 + R2 ) · ( R3 + R4 ) )
Für den Fall, dass alle Widerstände gleich sind ( R1 = R2 = R3 = R4 = R, z.B. 4 gleiche DMS) und parallel zu R4 ein Shuntwiderstand RS geschaltet wird, gilt:
Ua / Ue = ( R · ( R + RS ) - R · R ) / ( ( R + R ) · ( R + ( R + RS ) ) )
<=> Ua / Ue = RS / (4 · R + 2 · RS)
Der Widerstand wird so gewählt, dass das Ausgangssignal der verstimmten Brücke ca. 80 % des Signals bei Nennlast beträgt.
Wird ein anderer Wert angezeigt, so bedeutet es entweder
(1.) dass die nachgeschaltete Elektronik nicht richtig eingestellt ist, oder
(2.) dass sich die Impedanz des Sensors verändert hat.
SI-Basisgrößen und Einheiten des SI-Systems
Die SI-Einheiten beschreiben ausschließlich physikalische Größen und bestehen aus sieben Basisgößen und deren Einheiten:
Kürzel Basiseinheit Basisgröße
m Meter LängeAlle andere Einheiten des SI-Systems werden durch Multiplikation bzw. Division von Zehnerpotenzen mit den Basisgrößen oder deren Potenzen abgeleitet:
kg Kilogramm Masse
s Sekunde Zeit
A Ampere elektr. Stromstärke
K Kelvin thermodyn. Temperatur
mol Mol Stoffmenge
cd Candela Lichtstärke
Die SI-Einheiten sind ein metrisches Einheitensystem, also einen auf dem Meter oder einem dezimalen Vielfachen davon basierendes Einheitensystem.
Weitere metrische Systeme sind das CGS-System (Centimeter, Gram, Second), das MKS-System (Meter, Kilogram, Second) oder das erweiterete MKSA-System (Meter, Kilogram, Second, Ampere)
Im Gegensatz zu den SI-Einheiten steht das imperiale Einheitensystem oder auch Angloamerikanische Einheitensystem, dessen Ursprung im mittelalterlichen England liegt.
Dies beruht im wesentlichen auf den Einheiten:
Länge:
- Zoll (inch)
- Fuß (Foot) =12 inch
- Schritt (Yard) = 3 Fuß
- Meile (Mile) = (1760 Schritt)
- Grad Fahrenheit
- PSI

Die Beziehungen zwischen den verschienden Längengrößen sind hier abgebildet:

Die SI-Einheiten sind in Europa und in den meisten anderen Staaten - aber nicht in der USA - gesetzlich vorgeschrieben.
In den USA werden die 'gebräuchlichen Einheiten' parallel zu SI-Einheiten verwendt. Auch in Europa werden in der Messtechnik gebräuchliche Nicht-SI-Einheiten wie 'g' (Erdbeschleunigung) und 'bar' (Atmospärendruck) verwendet.
Die SI-Einheiten basieren auf den Maxwell-Gleichungen, die die Gesetze des Elektromagnetismus beschreiben. In der theoretischen Physik wird häufig das Gaußsche Einheitensystem verwendet, das auf das Coulombsche Kraftgesetz Bezug nimmt, in dem die Elementarladung auf 1 normiert wird.
Signalaufbereitung
Unter dem Begriff Signalaufbereitung versteht man Verfahren, die der "Verbesserung" eines Signals dienen. z.B. Impedanzwandlung, Verstärkung, Filterung, Linearisierung.
Signalformen, periodisch
Periodische Schwingungen können aus einer Superposition oder Überlagerung von sin- und cos-Funktionen erzeugt werden. Beispiele sind:
Dreiecksignal
y(t)= 8/π2·(sin(ωt) - 1/32·sin(3ωt) + 1/52·sin(5ωt) - ...)
y(t)= 8/π2·Σ(-1)k·sin((2k+1)ωt)/(2k+1)2, k :0 ...∞
Sägezahnsignal
y(t)= 2/π·(sinωt - 1/2·sin(2ωt) + 1/3µsin(3ωt) -...)
y(t)= 2/π·Σ(-1)k+1·sin(kωt)/k , k :1...∞
Rechtecksignal
y(t)=4/π·(sin(ωt) + 1/3·sin(ω3t) + 1/5·sin(5ωt) + ...)
y(t)=4/π·Σsin((2k+1)ωt)/(2 k+1), k:0 ...∞
->FFT
Signalverarbeitung
Der Begriff Signalverarbeitung bezeichnet die gesamte Elektronik, die notwendig ist, um das elektrische Sensorausgangssignal in eine für den Anwender nutzbare Form zu überführen.
Dies wäre im einfachsten Fall ein Messverstärker und eine Digitalanzeige, so dass das elektrische Signal in eine für den Anwender ablesebare Zahl umgewandelt wird.
Es sind aber auch komplexere Formen der Signalverarbeitung denkbar, bei denen das Signal zusätzlich gefiltert und mit anderen Signalen kombiniert wird.
Grundsätzlich wird zwischen analoger und digitaler Signalverarbeitung unterschieden.
Die analoge Signalverarbeitung basiert im Wesentlichen auf passiven Bauelementen und Operationsverstärkern. Bei der digitalen Signalverarbeitung wird das Signal nach erfolgter Digitalisierung mit Mikroprozessoren bzw. computergestützt verarbeitet.
Beispiele für Geräte, die der Signalverarbeitung dienen sind:
-> Datenerfassungskarte
-> Datenlogger
-> Digitalanzeige
-> Multimeter
-> Oszilloskop, analog
-> Oszilloskop, analog-digital
-> Oszilloskop, digital
-> SPS
Eine Neuheit stellen Sensoren dar, die bereits Teile der Signalverarbeitung beinhalten.
So besitzen solche Sensoren beispielsweise eine USB-Schnittstelle, so dass nach Verbindung mit einem PC unmittelbar der Messwert erfasst werden kann.
SMD
Abkürzung für: Surface-Mounted-Device
SMD-Bauteile sind miniaturisierte Bauteile mit Gehäuse, die Löt-Anschlussflächen (Löt-Pads) an Stelle von Drahtanschlüsse (Bonddrähte) besitzen und auf die Oberfläche von Leiterbahnen gelötet werden.
Sockel
Der Montagesockel ist die Grundplatte von Kraft- oder Beschleunigungsaufnehmern. Er ist mit eine Gewindestange, Gewindebohrung oder Klebefläche versehen und dient zur Befestigung dieser Aufnehmer direkt am Einsatzort oder über Montageadapter.
-> Sensormontage, Beschleunigungsaufnehmer mit Klebe-Montagesockel
-> Sensormontage, Beschleunigungsaufnehmer mit Gewinde-Montagesockel
Sockeldehnung
Werden Beschleunigungsaufnehmer auf biegbaren Strukturen befestiegt oder auf unebenen Oberflächen verschraubt, so kann es zur Dehnung des Montagesockels
kommen. Dies führt zu einer Verfälschung des Messsignals.
Um diesen Effekt zu minimieren ist auf die richtige Sensormontage zu achten (z.B. Oberfläche mit einem geeigneten Plansenker bearbeiten ).
Bei piezoelektrischen Beschleunigungsaufnehmern wird dieser Effekt durch die Scherbauform (Shear Mode) minimiert.
Solldruck
Der Solldruck ist der zu einem bestimmten Zeitpunkt an einem bestimmten Ort geforderte Druck.
-> Druck
-> Nenndruck
Sondermessbereiche
Außerhalb der standardmäßig verfügbaren Messbereiche von Sensoren lassen sich in vielen Fällen auf Wunsch des Kunden auch Sensoren mit Sondermessbereichen herstellen.
Spannungsbetrieb
Der Spannungsbetrieb gibt bei Quarzaufnehmern an, dass sie einen integrierten Ladungsverstärker besitzen und somit ein niederohmiges Spannungssignal zur Verfügung stellen.
-> IEPE-Schaltkreis
-> Ladungsausgang
Spannungsmessung
Elektrische Spannungen können prinzipiell mit verschiedenen Geräten gemessen werden.
-> Datenerfassungskarte
-> Oszilloskop
-> Voltmeter
Im Allgemeinen sind bei jeder Art der Spannugsmessung folgende Sachverhalte zu berücksichtigen:
- Innenwiderstand: Das Messgerät sollte einen möglichst hohen Innenwiderstand besitzen. So lässt sich vermeiden, dass durch das Messgerät ein Strom fließt, der die Messung verfälscht.
- Bezugspotential:
- potentialfreie Messung:
Beide Kontakte für die Spannungsmessung sind nicht mit einem Massepotential verbunden. (z.Bsp. Voltmeter) - geerdete Messung:
Ein Kontakt für die Spannungsmessung ist stets fest mit einem Massepotential verbunden. (z.Bsp. Oszilloskop)
- potentialfreie Messung:
-> Spannungsmessung, single ended (SE)
-> Spannungsmessung, differentiell (diff.)
Spannungsmessung, single ended (SE)
Wird eine Datenerfassungskarte im "single ended" Modus betrieben, so wird die angelegte Spannung stets relativ zu einem Massepotential gemessen. Dies setzt voraus, dass ein Pol der zu messenden Spannungsquelle ebenfalls mit diesem Massepotential verbunden ist, bzw. verbunden wird.

Zwar benötigt man im Vergleich zu zur differentiellen Spannungsmessung nur die Hälfte an Messeingängen, aber man muss beim Betrieb von Sensoren, die auf DMS basieren, auf eine potentialfreie Speisespannung achten. Bei der differentiellen Spannungsmessung ist dies nicht notwendig.
-> Spannungsmessung
-> Spannungsmessung, differentiell (diff.)
Spannungsmessung, differentiell (diff.)
Wird eine Datenerfassungskarte im "differentiell" Modus betrieben, so wird die angelegte Spannung nicht absolut in Bezug auf ein gemeinsames Potential gemessen, sondern es wird die tatsächliche Spannungsdifferenz der beiden Pole der Spannungsquelle gemessen.

Diese Betriebsart bietet gegenüber dem single ended Modus verschiedene Vorteile.
Zum einen können Störspannungen, die unter Umständen bei langen Messkabeln eine Rolle spielen, die Messung nicht verfälschen, da sie beide Messkabel gleich beeinflussen und daher die relative Spannungsdifferenz nicht verändern.
Zum anderen wird die Spannungsquelle (also z.Bsp. das Sensor-Ausgangssignal) nicht mit dem Massepotential verbunden. Dies ist insbesondere bei Sensoren, die auf Dehnungsmessstreifen basieren, wichtig. Falls deren Speisespannung nicht potentialfrei ist, würde bei nicht potentialfreier Messung der Ausgangsspannung des Sensors, ein Zweig der Wheatstoneschen Messbrücke des Sensors kurzgeschlossen.

-> Spannungsmessung
-> Spannungsmessung, single ended (SE)
Spannungsteiler

Wird eine Spannung an einen Widerstand R= R1 + R2 angelegt, so ist die Spannung Uaus, die an dem Widerstand R1 abgegriffen wird, gegeben durch: Uaus = Uein · (R1/R2)
Dies gilt allerdings nur für den unbelasteten Spannungsteiler, also für den Fall, dass kein nennenswerter Strom am Ausgang entnommen wird. Diese Schaltung findet z.B. Verwendung in potentiometrischen Wegaufnehmern.
-> Rheostat
Speisespannung
Die Speisespannung ist die Spannung, mit der (DMS -) Sensoren versorgt werden.
Abhängig von der Art, wie die Ausgangsspannung des Sensors gemessen wird (z.Bsp. single ended oder differentiell), muss man darauf achten, dass die Speisespannung potentialfrei ist. D.h., dass nicht ein Pol der Speisespannung fest mit einem Massepotential verbunden ist.
-> Labornetzteil
SPS
Abkürzung für: Speicherprogrammierbare Steuerung
Eine SPS bietet die Möglichkeit, Eingangssignale zu erfassen, zu verarbeiten und ggf. bestimmte Ausgangssignale zu erzeugen.
Dazu besitzt sie einen Eingabe-, Verarbeitungs- und Ausgabeteil. Diese Teile sind heutzutage allerdings nicht fest miteinander verschaltet. Vielmehr sind SPS mikroprozessorbasiert. Deshalb können die einzelnen Schritte der Signalverarbeitung per Software (häufig mittels grafischer Benutzeroberfläche) festgelegt werden.
Die SPS arbeitet zyklisch, so dass also zuerst alle Eingangssignale erfasst werden. Anschließend wird die Verarbeitung durchgeführt und in einem letzten Schritt die entsprechenden Ausgangssignale erzeugt. Dieser Zyklus kann beliebig oft wiederholt werden.
Steifigkeit, k
Die Steifigkeit ist ein Maß für die Nachgiebigkeit eines Kraftaufnehmers.
Steifigkeit: k= F/d, wobei
F = Kraft
d = Durchbiegung
-> Dehnung
Steife Sensoren besitzen eine höhere Eigenfrequenz und sind besser für dynamische Anwendungen geeignet.
Steuerdruck
Der Steuerdruck ist der für einen Steuervorgang erforderliche Druck.
-> Druck
Streckgrenze (Re)
Die Streckgrenze eines Werkstoffs ist die mechanische Spannung, bei der sich eine plastische Verformung der Zugprobe entwickelt, ohne das eine Zunahme der Spannung ersichtlich ist. (N / mm2). Sie stellt eine Unstetigkeit des Kurvenverlaufs im Spannung-Dehnungs-Diagramm dar.
Die obere Streckgrenze ReH wird durch den ersten wahrnehmbaren Spannungsabfall gekennzeichnet. Sie stellt das Ende der Hookeschen Geraden dar.
Die untere Streckgrenze ReL stellt die kleinste Spannung im Fließbereich bei weiter zunehmender Probenverlängerung dar.
-> Dehngrenze
-> Elastizitätsgrenze
-> Hookesches Gesetz
Strukturanalyse
Die Strukturanalyse liefert Informationen über die inneren mechanischen Spannungen einer Struktur. Hierdurch können Belastungen an Materialien vermindert und im schlimmsten Fall Materialzerstörung verhindert werden.
Die Strukturanalyse unterteilt man in
- quasi-statische Analyse
- dynamische Analyse
- Modalanalyse:
- Transientenanalyse:
und diese wiederrum in
Die Untersuchung modaler Größen.
Die Untersuchung von transienten Ereignissen.
-> Hüllkurven-Demodulation
-> Lagerüberwachung -> Materialprüfung
-> Modalanalyse
Sublimation
Als Sublimation bezeichnet man den direkten Phasenübergang eines Stoffes vom festen in den gasförmigen Aggregatzustand.
Summierschaltung
Die Summierschaltung ist eine elektronische Schaltung, die die Signale mehrerer Messwertaufnehmer zu einem gemeinsamen Ausgangssignal addiert.
-> normierte Sensitivität
Systemdruck
Der Systemdruck ist der Druck, der im statischen Fall in einem System herrscht.
-> Druck
-> Druckstoß
-> Differenzdruck
-> Liniendruck
Tara, Offsetabgleich
Sensoren haben oft wegen einer Vorlast einen Offset. Die Auswerte-Elektronik kann dann das Ausgangssignal des Sensors auf Null setzen, in dem sie von ihm den Offset subtrahiert. Dieses Verfahren wird Offsetabgleich oder Tarieren genannt.
Sensitivität
Technisches Datenblatt
Das technische Datenblatt dokumentiert die bekannten, allgemeinen Eigenschaften eines Messgerätes.
Die hier angegebenen Werte enstammen nicht der Kalibrierung eines einzelnen Messgerätes, sondern sind als allgemeine Eigenschaften des Gerätetyps zu sehen.
Oft werden untere, typische und obere Grenzen der Eigenschaften angegeben. Wenn nicht, ist davon auszugehen, dass es den ungünstigsten Fall beschreibt, und dass die Werte von allen Geräten des Typs eingehalten werden.
-> Kalibrierschein
technische Elastizitätsgrenze (Rp0,01)
Als technische Elastizitätsgrenze (Rp0,01) bezeichnet man eine Dehnung mit 0,1 % bleibender Verformung (N/mm2).
-> Elastizitätsgrenze
-> Dehngrenze
-> Hookesches Gesetz
TEDS (Transducer Electronic Data Sheet)
TEDS sind Speicherchips, in denen sensorspezifische Daten gespeichert werden. Sie werden im Sensor oder im Sensorstecker integriert.
Messgeräte, die TEDS unterstützen, können den angeschlossenen Sensor automatisch erkennen, inklusive Sensortyp, dessen Kalibrierdaten und benutzerspezifische Daten.
Welche Daten gespeichert werden, sind in den Normen IEEE 1451.2 und IEEE 1451.4. definiert.
Verschiedene TEDS-Versionen existieren:
Version 0.9 - IEEE P1451.4
Version 1.0 - IEEE 1451.4 sowie diverse firmenspezifische Versionen wie die
LMS-Version.
2012 war die aktuellste und meistbenutzte Version die Version 1.0
TEDS Grundstruktur:
- Hauptdaten
- Sensortyp
- Kalibrierdaten
- Benutzerdaten
- Hersteller-ID
- Modellnummer
- Versionzeichen
- Versionsnummer
- Seriennummer
- 25: Beschleunigungs- und Kraftsensoren
- 30: Sensoren mit verstärktem Ausgang
- 33: DMS Sensoren
- 34: LVDT/RVDT
- 36: Thermoelemente
- 40: Kalibriertabelle
- 41: Kalibrierkurve (Polynom)
- 42:Frequenzgangtabelle
Die Herstellerdaten (Hauptdaten, Sensortyp- und Kalibrierdaten) werden dagegen fest eingebrannt und können nachträglich nicht mehr verändert werden.
TEDS, Virtueller
Ist kein Speicherchip im Sensor integrierbar, können die Daten in einer externen Datei gespeichert werden.
Telemetrie
Als Telemetrie wird die berührungslose Messwertübertragung bezeichnet. Die gebräuchlichsten Verfahren dabei sind:
-> Übertragung per Funk
-> Übertragung per Infrarotlicht
-> induktive Übertragung
Neben der Übertragung von Messwerten zwischen Messwertaufnehmer und den Geräten der Signalverarbeitung kommt Telemetrie auch innerhalb eines Sensors zum Einsatz, wenn es sich das eigentlich Sensorelement auf einer rotierenden Welle befindet. Dies ist zum Beispiel bei Drehmomentaufnehmern der Fall.
Wenn dort der Einsatz von Schleifringen vermieden werden soll, wird stattdessen die Speisespannung induktiv eingekoppelt und der Messwert per Infrarotlicht übertragen.

Telemetrie per Funk
Bei dieser Art der Telemetrie werden die Messwerte in ein Funksignal kodiert, gesendet und an anderer Stelle wieder empfangen. Die Nutzung der freigegebenen Frequenzbereiche unterliegt dabei keiner Beschränkung, solange die Sendeleistung 10mW nicht überschreitet. Daher kann es bei dieser Form der Telemetrie leicht zu Störungen der Übertragung kommen.
Telemetrie per Infrarotlicht
Bei dieser Art der Telemetrie wird der Messwert in eine Folge von Lichtimpulsen kodiert. Das benutzte Frequenzspektrum liegt dabei im Infraroten. Da der Empfänger lediglich für Infrarotlicht empfindlich ist, ist eine Störung der Übertragung durch Tageslicht weitgehend ausgeschlossen.
Telemetrie per induktiver Übertragung
Bei dieser Art der Telemetrie wird der Messwert in ein Wechselspannungssignal kodiert. Dieses lässt sich dann induktiv zwischen zwei Spulen übertragen.
Temperaturbeiwerte
-> Temperaturkoeffizient
Temperaturbereiche
-> Betriebstemperaturbereich
-> kompensierter Temperaturereich
-> Lagertemperatur
-> Temperaturschock
Temperaturkoeffizient
-> thermische Sensitivitätsänderung
Temperaturkompensierung
Ändert sich die Umgebungstemperatur eines Messwertaufnehmers, so werden sich seine Eigenschaften dadurch ändern. Dieser Effekt kann mit Hilfe einer elektronischen Schaltung oder geeigneter Software korrigiert werden. Dieser Vorgang wird Temperaturkompensierung genannt.
Die Fehlergrenzen, die für solche kompensierten Sensoren im kompensierten Temperaturbereich angegeben werden, berücksichtigen allerdings - insbesondere für auf Halbleiter-DMS basierenden Sensoren - nur langsame Temperaturänderungen und keine schnellen Temperaturschocks.
Die Temperatur beeinflusst zwei Parameter:
- den Nullpunkt-Offset.
Dies wird thermische Nullpunktverschiebung genannt - die Sensitivität.
Dies wird thermische Sensitivitätsänderung genannt
Temperaturkompensierung, Wheatstonesche Brücke
Theoretisch dürfte es bei Wheatstoneschen Vollbrücken keine Temperaturschwankungen geben, da bei vier identischen Widerständen in der Brücke diese sich gegenseitig kompensieren. Real sind die Widerstände nie genau gleich, wodurch es von Anfang an zu einem Offset ungleich Null kommt.
Kommt eine Temperaturänderung hinzu, führt das zusätzlich zu einem temperaturbedingten Offset, da sich die Widerstände aufgrund der unterschiedlichen Ausgangswerte unterschiedlich stark verändern. Das wird korrigiert, indem man innerhalb der Brücke geeignete Kompensationswiderstände einbaut.
Bei der temperaturbedingten thermische Sensitivitätsänderung dagegen, wird die Brücke als Ganzes beeinflusst und muss als Ganzes – RBrücke – kompensiert werden.
Die klassische Art der Temperaturkompensierung ist die des Abgleichs mit Widerständen, es gibt aber auch ”intelligente Sensoren” auch ”Smart Sensors” genannt, die ASICs oder Mikroprozessoren eingebaut haben.
klassische Temperaturkompensierung
Folien-DMS und Halbleiter-DMS werden wegen ihrer deutlich unterschiedlichen Temperatureigenschaften mit unterschiedlichen Schaltkreisen kompensiert:
Halbleiter-DMS werden deutlich stärker durch Temperaturänderungen beeinflusst. Sie haben einen sehr viel größeren TCR=Temperature Coefficient of Resistance = Temperaturkoeffizienten des Widerstands.
TCR= (RT-RRef)/RRef
wobei RT der Widerstand bei einer Temperatur T ist
und RRef der Widerstand bei einer Referenztemperatur (meistens 20°C).
thermische Nullpunktoffset-Kompensierung
Um die Schaltung zu vereinfachen, wird annäherungsweise angenommen, dass drei der vier Brückenwiderstände konstant sind und nur einer (R3) sich ändert.
In unserem Beispiel ist es R3 im positiven Arm der Brücke.
Nullpunktoffset-Kompensierung Folien-DMS
Um die Nullpunktverschiebung durch die Temperaturänderung zur verkleinern, muss der Einfluss des Temperaturkoeffizienten TCR von R3 verkleinert werden.
Hierzu wird ein Widerstand in Serie zum negativen Arm der Brücke (R2) geschaltet. Er sollte klein sein, damit er die Brücke nicht zu sehr verstimmt, und einen großen Temperaturkoeffizienten TCR haben um die TCR des R3 trotzdem auszugleichen. Hierzu wird ein Nickel- oder Kupferwiderstand Rtz(Ni) verwendet.
Als Ausgleich der Brücke wird ein gleichgroßer Manganin(Cu84Ni4Mn12)-Widerstand (Rtz2- mit extrem niedrigen Temperaturkoeffizienten TCR) - in Serie zu R3 geschaltet.
Da die Kompensierung durch die Temperaturabhängigkeit des Nickel-Widerstands RNi geschieht, muss dieser innerhalb des Sensors angebracht werden. Diese Art der Kompensierung nennt man aktive Kompensierung.
Nullpunktoffset-Kompensierung Halbleiter-DMS
Will man bei Halbleiter-DMS die Kompensierung wie oben bei Folien-DMS erreichen, braucht man einen Widerstand mit einem höheren TCR als der des Halbleiter-DMS. Dazu kann man Thermistoren nutzen, was aber in der Praxis selten gemacht wird.
Üblicherweise wird bei Halbleiter-DMS stattdessen ein Widerstand in Serie (Rtz-s) und einer parallel (Rtz-p) geschaltet.
Hierdurch wird die Temperaturkoeffizienten TCR des Widerstands R3 so geändert, dass die Nullpunktverschiebung minimiert wird.
Da die Temperaturkoeffizienten TCR metallischer Widerstände << als die TCR der Halbleiterwiderstände sind, kann man Rtz-s und Rtz-p als temperaturunabhängig betrachen. Daher müssen diese Kompensierungswiderstände NICHT die gleiche Temperatur wie die der Brücke haben und können sich auch außerhalb der Sensoren befinden, beispielsweise in einem Kompensationsmodul oder Stecker.
Dieser Art der Kompensierung nennt man passive-Kompensierung
thermische Sensitivitäts-Kompensierung
Man nutzt hier das Prinzip, dass eine Änderung der Speisung einer Brücke einer Änderung der Sensitivität entspricht.
Durch einen in Serie zur Brücke geschalteten Widerstand ist es möglich den Spannungsabfall über die Brücke (UBrücke) zu regulieren (Spannungsteiler). Hierduch kann man die temperaturbedingte Sensitivitätsänderung der Brücke kompensieren.
Die Sensitivitätsänderung ist allgemein gegeben durch K/E, wobei
K= K-Faktor = "Gage Factor" ist und
E= Elastizitätsmodul = Youngsches Modul ist.
Sensitivitäts-Kompensierung Folien-DMS
Bei Folien-DMS steigt Sensitivitätsänderung K/E der Gesamtbrücke mit steigender Temperatur.
Daher muss bei steigender Temperatur die über die Brücke anliegende Spannung (UBrücke) verkleinert werden.
Um die Brückenspannung entsprechend kleiner zu machen, wird ein temperaturabhängiger Widerstand Rts1(Ni) in Serie zur Brücke geschaltet.
Da die Temperaturkoeffizienten TCR des Widerstands Rts1(Ni) >> als der TCR der Brücke RBrücke ist, kann man RBrücke als temperaturunabhängig betrachten. Eine Erhöhung der Temperatur führt damit zu einem Sinken der Spannung über die Brücke, was die Erhöhung der K/E mit steigende Temperatur kompensiert.
Diese Temperaturabhängigkeit des Widerstands Rts1 erzwingt es diesen innerhalb des Sensors anzubringen.
Sensitivitäts-Kompensierung Halbleiter-DMS
Bei Halbleiter-DMS sinkt K/E der Gesamtbrücke mit steigender Temperatur.
Daher muss wir bei steigender Temperatur die über die Brücke anliegende Spannung (UBrücke) erhöht werden.
Um die Brückenspannung entsprechend größer zu machen, wird ein Widerstand Rts1 in Serie zur Brücke geschaltet.
Da die Temperaturkoeffizienten TCR des Widerstands Rts1 << als die TCR der Brücke RBrücke ist, kann man Rts1 als temperaturunabhängig betrachten und eine Erhöhung der Temperatur führt zu einem Steigen der Spannung über die Brücke.
. Diese relative Temperaturunabhängigkeit des Widerstands Rts1 erlaubt es diesen außerhalb des Sensors anzubringen.Der Ausgleichswiderstand Rts1 wird so gewählt, dass er die temperaturbedingte Sensitivitätsänderung genau kompensiert.
-> Betriebstemperaturbereich
-> kompensierter Temperaturbereich
-> Temperaturkoeffizient
-> Temperaturkompensierung
-> Temperaturschock
Temperaturschock
Als Temperaturschock (oder Temperaturtransient) wird die kurzzeitige, schnelle Änderung der Temperatur (-> transienter Verlauf) bezeichnet.
Erfährt ein Sensor eine solche Temperaturänderung, so kann es sein, dass er währenddessen nicht gemäß seiner Spezifikationen arbeitet, auch wenn der kompensierte Temperaturbereich nicht verlassen wurde.
Beim Betrieb von Sensoren ist also stets darauf zu achten, dass die angebenen Temperaturbereiche nur im quasi-statischen Zustand gültig sind. Schnelle Temperaturänderungen sind demnach grundsätzlich zu vermeiden, solange der Sensor nicht explizit dafür ausgelegt ist.
-> Betriebstemperaturbereich
-> kompensierter Temperaturbereich
-> Temperaturkoeffizient
-> Temperaturkompensierung
Temperaturtransient
-> Temperaturschock
thermische Nullpunktverschiebung
Thermische Nullpunktverschiebung bedeutet, dass sich der Nullpunkt eines Messwertaufnehmers auf Grund thermischer Einflüsse verändert. Die nachfolgende Grafik zeigt, dass man aber keine Aussage treffen kann, in welcher Art sich der Nullpunkt bei wachsender Temperatur verschiebt. Es ist jedoch stets sichergestellt, dass sich der Nullpunkt bei Temperaturen innerhalb des kompensierten Temperaturbereiches nicht stärker verschiebt als im Datenblatt (bzw. im Kalibrierzertifikat) angegeben.

-> kompensierter Temperaturbereich
-> Fehler
-> Nichtlinearität
-> Hysterese
-> Wiederholbarkeit
-> thermische Sensitivitätsänderung
thermische Sensitivitätsänderung
Als thermische Sensitivitätsänderung (auch Temperaturkoeffizient genannt) bezeichnet man die Änderung der Sensitivität bzw. der Empfindlichkeit auf Grund thermischer Einflüsse.

-> Sensitivität
-> kompensierter Temperaturbereich
-> Fehler
-> Nichtlinearität
-> Hysterese
-> Wiederholbarkeit
-> thermische Nullpunktverschiebung
thermisches Verhalten
Das thermische Verhalten beschreibt die Reaktion eines Messwertaufnehmers auf eine Änderung der Umgebungstemperatur.
Im Allgemeinen reagiert ein Sensor auf eine Temperaturänderung mit einer Nullpunktverschiebung und Sensitivitätsänderung.
-> kompensierter Temperaturbereich
-> Fehler
-> Nichtlinearität
-> Hysterese
-> Wiederholbarkeit
-> thermische Nullpunktverschiebung
-> thermische Sensitivitätsänderung
-> kompensierter Temperaturbereich
-> Temperaturkoeffizient
Thermistor
Ein Thermistor ist ein Halbleiter, dessen Widerstand bei Temperaturerhöhung rapide sinkt.
Diese Abhängigkeit ist jedoch nicht linear und muss anhand von Tabellen oder mit Hilfe einer Elektronik linearisiert werden. Thermistoren werden für Temperaturmessungen und zur Temperaturkompensierung benutzt.
-> Thermoelement
-> RTD
Thermoelement, Thermocouple, Thermopaar
Verbindet man zwei Metalle zu einem Thermopaar, so bildet sich zwischen den freien Enden eine Spannung aus, die von der Temperaturdifferenz zwischen Verbindungsstelle und den freien Enden abhängig ist.
Beispiele für Thermopaare:
Typ T: Cu - CuNi
Typ E: NiCr - CuNi
Typ J: Fe - CuNi
Typ K: NiCr - Ni
Typ S: Pt10%Rh - Pt
Typ R: Pt13%Rh - Pt
Typ B: Pt30%Rh - Pt
Typ L: Fe - CuNi
Typ U: 710 Cu - CuNi
-> RTD
-> Thermistor
Tot-Volumen
Das Volumen, das entsteht, wenn die Messmembran eines Druckaufnehmers nicht frontbündig sondern nach hinten versetzt ist, nennt man Totvolumen. Ist das Totvolumen nicht vernachlässigbar gegen das kleinste vorkommende Volumen des zu messenden Mediums, ensteht ein systematischer Fehler.
Trägerfrequenz, Trägerfrequenzverstärker
Sensoren auf Folien-DMS-Basis werden typischerweise in einer Wheatstoneschen Messbrücke betrieben. Diese lässt sich nicht nur mit Gleichspannung, sondern auch mit einem Wechselspannungssignal betreiben. Dies bietet die Möglichkeit, selbst kleine Sensorsignale (die die bekannte Trägerfrequenz besitzen) von Störsignalen (mit einer Frequenz ungleich der Trägerfrequenz, -> Rauschen) zu unterscheiden.
Beachtet werden muss, dass es zu einer Phasenverschiebung zwischen eingespeistem Signal und resultierendem Signal kommen kann.
Da Trägerfrequenzverstärker für kleine Eingangssignale entwickelt wurden, können Signale von Halbleiter-DMS im Allgemeinen nicht mit ihnen verarbeitet werden.
Triangulation

Bei diesem Messverfahren trifft ein Laserstrahl senkrecht auf ein diffus reflektierendes Werkstück. Das Streulicht wird je nach Abstand vom Messobjekt in unterschiedlichem Winkel reflektiert und über eine Linse auf eine CCD-Zeile abgebildet. Der Winkel (Alpha) kann über den Auftreffort des Lichts auf der CCD-Zeile bestimmt werden. Da der Abstand zwischen CCD und Laser bekannt ist, kann so der Abstand zum Messobjekt berechnet werden.
-> Laserwegaufnehmer
Triaxialaufnehmer
Triaxialaufnehmer sind Messwertaufnehmer, die gleichzeitig in alle 3 Raumrichtungen (x,y,z) messen.
Dies kann auch realisiert werden, indem man drei (einaxiale) Beschleunigungs- oder Kraftaufnehmer auf einem Würfel montiert.
Triboelektrisches Rauschen
Bei Bewegungen von Messkabeln können Ladungen erzeugt werden, indem einzelne Bestandteile des Kabels aneinander reiben (triboelectric effect, griechisch tribein=reiben). Diese stören das übertragenen Signal. Dies vermeidet man durch die Befestigung des Kabels an geeigneten Stellen und die Wahl spezieller „low noise"-Kabel (= „wenig Rauschen").
-> Low-Noise-Kabel
-> Kabelverlegung:
Turmalin
Turmalin ist ein Kristall, der den piezoelektrischen Effekt aufweisst und eine "volumetrische" Empfindlichkeit besitzt. Er kommt in Druckaufnehmern zum Einsatz, wenn eine hohe Resonanzfrequenz benötigt wird.
Überdehnung
Das Überschreiten der Elastizitätsgrenze wird als Überdehnung bezeichnet.
-> Überlastung
Überdruck
Überdruck ist der auf den aktuellen Atmosphärendruck bezogene Druck.
-> Druck
Überlastung
Überschreitet ein Sensor die Elastizitätsgrenze, können sich die technischen Spezifikationen ändern. Der Aufnehmer sollte überprüft werden und, falls noch möglich, neu kalibriert werden.
-> Bruchlast
-> Berstdruck
-> Prüfdruck
-> Überdehnung
Überlastbarkeit
Die Überlastbarkeit eines Sensors wird in zwei Kategorien unterteilt:
- Überlastbarkeit ohne
Beschädigung
Der Aussteuerungsbereich eines Sensors, in dem kein bleibender Schaden, beispielsweise durch Überdehnung des Materials (-> Hookesches Gesetz), auftritt. - Überlastbarkeit ohne Zerstörung
Der Aussteuerungsbereich eines Sensors, in dem er nicht zerstört wird. Allerdings kann bei Beanspruchung des Sensors innerhalb dieses Bereiches bereits eine dauerhafte Beschädigung (z.Bsp. durch Überdehnung des Materials) eintreten.
Bei Druckaufnehmern liegt dieser Bereich oberhalb der Überlastbarkeit ohne Beschädigung und unterhalb des Berstdrucks.
-> Berstdruck
-> Bruchlast
Überlastschutz
Ein Überlastschutz ist ein mechanischer Anschlag oder eine mechanische Sperre, die sicherstellt, dass der Sensor eine hohe Überlastbarkeit (bis 100-fach) besitzt. Ein hoher Überlastschutz ist insbesondere für Sensoren mit sehr niedrigen Messbereichen wichtig, da sie sonst allein durch Berührung überlastet werden können. Sensoren mit mechanischen Anschlägen haben meistens eine niedrige Eigenfrequenz und sind nicht für hochdynamische Anwendungen geeignet.
Eine weitere Möglichkeit einen höheren Überlastschutz zu erreichen, ist einen Sensor mit höherem Messbereich einzusetzen, diesen aber im niedrigeren Bereich zu kalibrieren.
Beispiel: Kalibrierung bei 50% vom Nennbereich
Benötigt wird ein Kraftaufnehmer mit 50 N Messbereich aber einer Überlastbarkeit von 200 N.
Hier könnte man einen 100 N Kraftaufnehmer mit 200 % Überlastbarkeit einsetzen und den Sensor im 50 N Bereich kalibrieren.
Ein weiterer Vorteil dieser Vorgehensweise ist die höhere Steifigkeit, und damit die bessere Dynamik.
Die allgemeine Meinung, dass die Genauigkeit dann zweimal schlechter wird, ist nicht richtig, wie man in der unteren Abbildung am Beispiel der Nichtlinearität erkennt:

Ähnlich verhält es sich mit der Hysterese und Wiederholbarkeit, da das Material im unteren Bereich elastischer ist.
Wie die Gesamtgenauigkeit beeinflusst wird, hängt vom Kurvenverlauf ab.
Der einzige Nachteil ist der, dass das Ausgangssignal niedriger wird, und somit das Signal-Rauschverhältnis schlechter wird. Hat der Sensor aber einen eingebauten Verstärker, ist auch diese Verschlechterung aufgrund der kurzen Kabellängen unwesentlich.
Nur die thermischen Eigenschaften wie die thermische Nullpunktverschiebung und thermische Sensitivitätsänderung werden prozentual schechter.
Überlast-Erholzeit
Die Überlast-Erholzeit ist die Zeit, die vergeht, bis ein Sensor wieder gemäß seiner Spezifikationen funktioniert, nachdem er überlastet wurde.
Überschwingen
Das Ausgangsignal von Messwertaufnehmern folgt der sprunghaften Änderung der Messgröße nicht beliebig genau. Das Überschwingen bezeichnet nun die Tatsache, dass nach so einer sprunghaften Änderung das Ausgangssignal zeitweise größer ist als der tatsächliche Wert.
-> Anstiegszeit
-> Einschwingzeit
Übersprechen
Elektrische Signale in parallelen Leitungen können sich bei unzureichender Abschirmung gegenseitig durch Induktion beeinflussen.
-> Induktionsgesetz
-> Induktionsprinzip
Übersteuerung, Übertragungsbereich
Geräte, die Messgrößen oder Signale wandeln (z.B. Sensoren, Verstärker) besitzen einen proportionalen Übertragungsbereich (Aussteuerungsbereich), in dem ein linearer Zusammenhang (Übertragungsfaktor) zwischen Eingangs- und Ausgangssignal existiert. Ist das Eingangssignal zu groß, kommt es zu Übersteuerung und das Ausgangssignal ist nicht mehr proportional zum Eingangssignal.
-> elastischer Bereich
Übertragungsfaktor
Der Übertragungsfaktor ist definiert als Quotient des Ausgangssignals und des Eingangssignal bzw. der physikalischen Eingangsgröße.
-> Empfindlichkeit
-> Kennlinie
-> Sensitivität
Übertragungsfunktion, Transferfunktion
Wird eine Struktur durch ein Erregersignal angeregt und das Antwortsignal gemessen, so beschreibt die Übertragungsfunktion (bzw.Transferfunktion) das Verhältnis der Frequenzspektren der Antwort- und Erregersignale:
H(f) = X(f) / P(f)
Wird "P(f)" sehr klein (gegen Null), so ist der Fehler natürlich sehr groß (Division durch Null!). Diese Bereiche der Übertragungsfunktion sind nicht aussagekräftig. Es ist also sinnvoll, ein möglichst breitbandiges Spektrum zu übertragen. Ideal wäre ein Rechteckimpuls. Ein Impulshammer ist für die Erzeugung von Erregerimpulsen gut geeignet.
Die Übertragungsfunktion ist die Fourier-Tranformierte der Stoßantwort des Erregersignals:
Es gibt sechs Hauptübertragungsfunktionen, die in der mechanischen Systemanalyse verwendet werden, und jede dieser Funktionen berechnet das Verhältnis der Ausgangsantwort zum Erregerimpuls:
- Kraft/Beschleunigung - dynamische Masse (Dynamic Mass)
- Kraft/Geschwindigkeit - mechanische Impedanz (Mechanical Impedance)
- Kraft/Weg - dynamische Steifigkeit (dynamicstiffness)
- Weg/Kraft - elastische Nachgiebigkeit (Compliance)
- Geschwindigkeit/Kraft - mechanische Admittanz, mobilität (Mobility, Mechanical Admittance)
- Beschleunigung/Kraft - Inertanz - (Accelerance, Inertance)
Ultraschallwegaufnehmer
Ultraschallwegaufnehmer werden für Abstandsmessungen und zur Objekterkennung eingesetzt (z.B. als Näherungsschalter).
Ultraschallsignale sind hochfrequente Schallwellen. Piezokeramiken werden eingesetzt um elektrischer Energie in Akustischer Energie umzuwandeln (Lautsprecher) und umgekehrt (Mikrofon).

Ein Ultraschall-Lautsprecher sendet einen kurzen Schallimpuls aus, der von einem Gegenstand reflektiert und von einem auf den Lautsprecher abgestimmten Ultraschall-Mikrofon wieder empfangen wird. Die Laufzeit, die das Ultraschallsignal zurückgelegt hat, ist proportional zum Weg.
Durch den Doppler-Effekt lassen sich zusätzlich zur Entfernung Bewegungsrichtungen und Geschwindigkeiten feststellen.
Ultraschallsensoren können auch für die Bestimmung der Koordinaten einer Person oder eines Gegenstandes im Raum benutzt werden. Hierzu benötigt man drei Ultraschallsensoren und eine Infrarot-Signalübertragung.
Umlaufdruck
Der Umlaufdruck ist der Druck, der in einer auf Umlauf geschalteten Anlage herrscht.
-> Druck
Unterdruck
-> Vakuum
Vakuum
Das Vakuum ist definiert als:
Zustand eines Systems bei Drücken unterhalb des Atmosphärendrucks.
Das Vakuum ist die Bezugsgröße bei der Absolutdruckmessung.
-> Druck
Verdichtungsdruck
Der Verdichtungsdruck ist der Druck eines verdichteten Fluids bei einem bestimmten, verringerten Volumen.
Verlauf, dynamischer
Verläufe die sich schnell oder schlagartig ändern, bezeichnet man als dynamische Verläufe. Im Gegensatz zu transienten Verläufen sind diese nicht kurzzeitig. Die Untersuchung solcher Verläufe in der Strukturanalyse nennt man Modalanalyse.
Verlauf, quasistatischer
Als quasistatischer Verlauf werden sich sehr langsam - d.h. mit niedrigen Frequenzen - ändernde Vorgänge bezeichnet, die sich fast statisch verhalten.
Die bei der Schwingungsanalyse meist eingesetzten piezoelektrischen Sensoren sind nicht in der Lage, statisch zu messen, können aber quasistatisch messen, also fast bis 0Hz. Wie langsam, hängt von der Entladezeitkonstante ab. Sie können aber sehr hochfrequent messen (>>10 kHz).
Piezoresistive und kapazitive Beschleunigungsaufnehmer dagegen können statisch UND quasistatisch messen und werden deshalb bevorzugt für solche Messungen eingesetzt. Nach oben sind sie begrenzt auf 2kHz oder weniger - abhängig vom Messbereich und Prinzip.
Verlauf, statischer
Als statischer Verlauf werden über längere Zeit konstant bleibende und sich nicht ändernde Vorgänge bezeichnet.
Verlauf, transienter
Ein transienter Verlauf ist ein sehr schneller und kurzzeitiger Verlauf, den man beispielsweise als Reaktion (Antwort) auf einen Stoß-Impuls erhält.
Ein typisches Beispiel hier für ist ein (reales) Feder-Masse-System. Wird es durch einmalige Auslenkung aus seiner Ruhelage angeregt, so klingt seine Schwingungsamplitude exponentiell ab. Dieses Verhalten zeigt die nachfolgende Grafik:

Die Amplitude dieser gedämpften Schwingung wird beschrieben durch:
x(t) = x0 exp(-dt) cos(SQR(w02-d2))
Weitere Beispiele für das Auftreten transienter Impulse sind Crash-Tests in der Automobilindustrie oder der Einfluss von Erdbeben auf Gebäude.
-> Beschleunigungsaufnehmer
Verteilungsdichte (Wahrscheinlichkeitsdichte, Häufigkeitsfunktion, Klassenhäufigkeit, Amplitudenhistogramm)
Die Verteilungsdichte () p(a) ist die Ableitung der Verteilungsfunktion P(a) und ist ein Maß für die relative Wahrscheinlichkeit mit der die Funktion x(t) den Wert a annimmt. Sie ist stets positiv.

-> Autokorrelationsfunktion
-> Autoleistungsdichte (Autoleistungsspektrum)
-> Erwartungswert
-> Kreuzkorrelationsfunktion
-> Kreuzleistungsdichte (Autoleistungsspektrum)
-> Verteilungsdichte
-> Verteilungsfunktion
Verteilungsfunktion (Wahrscheinlichkeitsverteilung, Summenhäufigkeit)
Die Verteilungsfunktion P(a) gibt die Wahrscheinlichkeit W an, mit der die Funktion x(t) Funktionswerte annimmt, die kleiner oder gleich einem Wert a sind.

Vibration
Vibration ist eine Beschleunigung, deren zeitlicher Mittelwert gleich Null ist und für die gilt: E = Integral a dt = 0.
Vibrator
-> Shaker
Villary-Effekt
Eine Verformung eines ferromagnetischen Stabes in Längsrichtung verursacht eine Änderung seiner magnetischen Eigenschaften (z.B. der Permeabilität).
In einem Magnetfeld können diese Änderungen in ein elektrisches Signal umgewandelt werden (Induktionsprinzip) und somit messtechnisch erfassst werden.
-> Magnetostriktive Wegaufnehmer
-> Wiedemann-Effekt
Voltmeter
Ein Voltmeter ist ein Messgerät zur Messung der elektrischen Spannung.
Neben dem analogen Voltmeter, das ein Drehspulinstrument zur Anzeige benutzt, gibt es auch digitale Voltmeter (Abk.: DVM), die eine LED- oder LCD-Anzeige benutzen.
-> Multimeter
volumetrische Empfindlichkeit
Die elektrische Spannung piezoelektrischer Kristalle mit volumetrischer Empfindlichkeit ist unabhängig von der Richtung der angreifenden Kraft.
Vorlast
Die Vorlast ist die auf einen Kraftaufnehmer wirkende Kraft, die durch sein Eigengewicht oder durch eine gleichbleibende Belastung nach seiner Montage verursacht wird.
-> Tarieren
-> Sensitivität
Wafer
Aus der Schmelze hochreinem Siliziums wird eine kristalline Stange gefertigt. Diese wird in dünne Scheiben geschnitten und dann durch Schleifen und Polieren geglättet.

-> Dye
Wägezelle
Eine Wägezelle ist eine Vorrichtung zur Bestimmung der Masse eines Körpers.
Im Allgemeinen besteht eine Wägezelle aus einem Kraftaufnehmer und einer mechanischen Konstruktion, die auch dann eine zentrische Krafteinleitung auf den Kraftaufnehmer sicherstellt, wenn der zu wiegende Körper nicht zentrisch auf der Wägezelle positioniert ist.
Die Messwerte werden mit den gängigen Verfahren der Messwertübertragung ausgegeben.
Wegaufnehmer
- berührende Wegaufnehmer:
- verschleißfreie Wegaufnehmer:
- berührungslose Wegaufnehmer:
Seilzugwegaufnehmer
potentiometrische Wegaufnehmer
LVDT
LVIT
Messtaster
Magnetostriktive Wegaufnehmer
Laserwegaufnehmer
Wirbelstromwegaufnehmer
Ultraschallwegaufnehmer
-> inkrementale Wegaufnehmer
Wheatstonesche Messbrücke
Die Wheatstonesche Brückenschaltung besteht aus vier Widerstände die folgendermaßen geschaltet werden:
Bei einer Messbrücke sind die Arme der Wheatstonesche Brückenschaltung mit DMS bestückt.
Sind alle 4 Widerstände mit DMS bestückt, so spricht man von einer Vollbrücke,
bei zwei DMS von einer Halbbrücke.

Wird nur ein DMS benutzt, spricht man von einer Viertelbrücke.

Die Ergänzung zur vollen Brücke erfolgt stets durch Festwiderstände, die extern zugeschaltet werden.
Legt man eine bekannte Speisespannung Ue an den Eingangszweig an, so entsteht am Ausgangszweig (der "Messdiagonalen"), eine Ausgangsspannung Ua, deren Wert von den Verhältnissen der Widerstände (R1 / R2) und (R3 / R4) abhängt.
Generell gilt die Beziehung:
Spannung am Spannungsteiler R1 R2:
U1 = Ue · ( R1 / ( R1 + R2 ) )
Spannung am Spannungsteiler R3 R4:
U2 = Ue · ( R3 / ( R3 + R4 ) )
Ua = U1 - U2
=> Ua = Ue · ( R2 / ( R1 + R2 ) ) - Ue · ( R3 / R3 + R4 )
<=> Ua / Ue = ( R2 · R4 - R3 · R1 ) / ( ( R1 + R2 ) · ( R3 + R4 ) )
Für den abgeglichenen Zustand gilt:
R2 · R4 = R1 · R3 oder R1 / R2 = R4 / R3
=> Ua / Ue = 0
Ändern die Widerstände R1 bis R4 ihren Wert im abgeglichenem Zustand, so wird die Brücke verstimmt und am Ausgang erscheint die Spannung Ua.
Wird eine Messbrücke aus Dehnungsmessstreifen (DMS) an ein Messobjekt geklebt, liefert die Brücke bei einer Belastung des Messobjektes ein Messsignal, das der relativen Widerstandsänderung und damit der Dehnung proportional ist.
Spannungswerte der DMS, die in benachbarten Brückenarmen auftreten, subtrahieren sich, wenn sie gleiche Vorzeichen haben. Sie addieren sich, wenn sie verschiedene Vorzeichen haben.
Daraus lassen sich verschiedene Kombinationsmöglichkeiten, wie Addition oder Subtraktion von Messwerten und Kompensationsmöglichkeilen, wie Ausgleich von Temperatur- und Nullpunkt-Offsets ableiten.
-> Brückenverstärker
Weißes Rauschen
Weißes Rauschen ist statistisch zufälliges Rauschen und hat - über alle Frequenzen verteilt - die gleiche Signalleistung im zeitlichen Mittel.
Wegen der über alle Frequenzen gleich verteilten Leistungsdichte ist dies dies die ideale Signalquelle, um Schwingungseigenschaften von Strukturen zu untersuchen.
Controller für Schwingerreger bieten daher auch weißes Rauschen als Anregungsoption an. Auch Impulshämmer, die nährungsweise einen Dirac-Stoß darstellen, erzeugen eine über alle Frequenzen gleich verteilte Leistungsdichte.
Widerstand, elektrischer
Der elektrische Widerstand eines elektrischen Leiters ist definiert als:
R = (spezifischer Widerstand * Länge) / (Leiterquerschnitt)
Man erkennt, dass sich mit Änderung des Leiterquerschnitts und der Länge der Widerstand des Leiters ändert. Diese Tatsache wird bei Dehnungsmessstreifen (DMS) genutzt.
-> piezoresistiver Effekt
Wiederholbarkeit
Die Kennlinien eines Sensors bei zwei aufeinanderfolgenden Lastzyklen sind in der Praxis nicht identisch.

Den Mittelwert der absoluten Abweichungen der Ausgagngssignale bezeichnet man als Wiederholbarkeit.
Dieser Fehler ist materialbedingt und kann nicht korrigiert werden.
-> Fehler
-> Gesamtgenauigkeit
-> Nichtlinearität
-> Hysterese
-> thermisches Verhalten
-> thermische Nullpunktverschiebung
-> thermische Sensitivitätsänderung
Wiedemann-Effekt
Fließt entlang eines ferromagnetischen Stabes ein Strompuls, so erzeugt er ein konzentrisches Magnetfeld. Trifft dieses nun auf ein longitudinales Magnetfeld, das durch einen Permanentmagneten erzeugt wird, so bewirkt dies eine mechanische Verdrehung (Torsion) des Stabes.
-> Induktionsprinzip
-> Magnetostriktive Wegaufnehmer
-> Villary-Effekt
Wirbelstrom-Wegaufnehmer
Wirbelstromwegsensoren werden eingesetzt, wenn der zu messende Weg klein ist (üblicherweise <15mm) und das Messobjekt ein elektrisch leitendes Metall ist (sowohl ferromagnetisch, als auch nicht-ferromagnetisch).
Befindet sich ein elektrisch leitendes Metall in einem zeitlich veränderlichen Magnetfeld, dann wird nach dem faradayschen Induktionsgesetz darin ein Wirbelstrom induziert. Bei Wirbelstromwegsensoren wird dieses Magnetfeld durch eine Spule erzeugt, in der ein Wechselstrom fließt.
Dieses Magnetfeld erzeugt in dem Messobjekt einen Wirbelstrom, der wiederum ein entgegengesetztes Magnetfeld verursacht. Da sich dieses Magnetfeld dem Spulen-Magetfeld überlagert, wird dadurch die Impedanz der Spule verändert.

Die Änderung der Impedanz ist also abhängig vom Abstand "h" zwischen der Metallplatte und dem Sensor.
Wirbelstromwegsensoren sind unempfindlich gegenüber Öl, Schmutz, Staub, Feuchte und Störfeldern und für den Einsatz in rauher industrieller Umgebung geeignet.
Young's Modulus
Young's Modulus ist die englische Bezeichnung für den Elastizitätsmodul.
Zugfestigkeit (Rm)
Die Zugfestigkeit ist die mechanische Spannung, bei deren Überschreiten ein Bauteil bricht.
Zulässiger Druck
Aus sicherheitstechnischen Gründen darf der zulässige Druck beim Betrieb eines Gerätes nicht überschritten werden, da das Gerät nur bis zu diesem Druck funktionsfähig ist. Der zulässige Druck entspricht dem Nenndruck.
-> Druck
Zukunftsausblick
Materialien der Zukunft

Graphen gab es schon immer. Beispielsweise besteht Graphit aus mehreren Graphenschichten.
Man hat nur nicht gewusst, dass diese 1 Atom dicken Schichten sich isolieren lassen.
Interessant ist, dass 1 Atom dicke, geschlossene Formen von Graphen (wie Fulleren, dessen Struktur an einen Fußball erinnert) und Kohlenstoff- Nanoröhrchen, viel früher entdeckt und erzeugt wurden als das isolierte 2-dimensionale Graphen.
Die allgemeine Meinung war, dass - gerade weil die anderen Formen schon existierten - eine solche zweidimensionale 1-Atom dicke Schicht sich aufrollen oder einfach auflösen würde.
Letztendlich war die Isolierung banal. Wahrscheinlich hat jeder von uns schon Graphene 'produziert', wenn wir mit Bleistiften auf Papier geschrieben haben, wobei nur eine 1 Atom dicke Schicht abgetragen wurde.
Man fand heraus: wenn die Schicht mehr als ein Atom dick ist, ist es möglich, Schichten mit Klebeband abzutragen, so dass nur eine 1-Atom dicke Schicht übrig bleibt.
Diese 1 Atom dicke Schicht heißt Graphen und hat bemerkenswerte Eigenschaften. Mit Kohlenstoff-Nanoröhrchen und Fullerenen sind sie DIE Materialien der Zukunft:
Eigenschaften:
-
Die Waben-Struktur von Graphen ist perfekt - bedingt durch die hohen Bindungskräfte zwischen den Kohlenstoffatomen.
-> Hohe Festigkeit
-> Hohe Temperaturbeständigkeit - Extrem leicht - wegen der 1 Atom dicken Schicht
- Trotzdem ist es möglich, diese Wabenstruktur bis zu 20% zu 'dehnen'
- Elektronen können fast unbehindert durch diese Molekularstruktur wandern, mit einer Geschwindigkeit von ca. 1 Million m/s, so dass eine hohe Leitfähigkeit entsteht
- 98% Transparenz - wegen der 1 Atom dicken Schicht
- An der 1 Atom dicken Schicht können Quanten-Tunneleffekte einfach studiert werden
Daraus folgen viele zukünftige Möglichkeiten:
- Transistoren aus Graphen - wegen der extrem kleinen Größe und der elektrischen Eigenschaften - als Basis für Nano-Computer
- Extrem dünne Bildschirme auf Graphenbasis - wegen der Leitfähigkeit und Transparenz
- Wandlung von Kunststoffen in leitfähiges Material durch Hinzugabe von kleinen Mengen von Graphen
- leitfähige Holz/Zinn Elektroden (durch Nanoröhrchenbeschichtung) für umweltschonende, Natrium-Ionen basierende Batterien
- mechanische Verstärkung von Kunststoffen durch Dazumischen von Graphen
- höhere Temperaturbeständigkeit von Kunststoffen durch Hinzufügen von Graphen
- Neue Verbundstoffe, die leichter, stabiler, flexibler und temperaturbeständiger sind - für die Herstellung von Autos, Flugzeugen etc.
- extrem lange Kohlenstoff-Nanoröhrchen als extrem leichte und stabile Faser, die beispielsweise für einen Weltraum-Aufzug zu einer geostationären Station verwendet werden könnte: Eine Vision, der Arthur C. Clarke in seinem Roman Foundations of Paradise 1979 schon hatte.
-
Und last but not least, neue Sensoren:
Beispielsweise wäre ein sehr empfindlicher Sensor für Umweltverschmutzung denkbar, da die Adsorbtion von einem Molekül in die Kohlenstoffgitterstruktur schon feststellbar wäre.
Wegen dieser weitreichenden Möglichkeiten und der Bedeutung für die Zukunft haben Andre Geim und Konstantin Novoselov für diese Entdeckung den Nobelpreis für Physik 2010 erhalten.
-> Quelle: Nobelpreis für Physik 2010